
在给定图像或视频流的情况下,目标检测模型可以识别可能存在已知目标集合中的哪些目标,并提供关于它们在图像中的位置的信息。
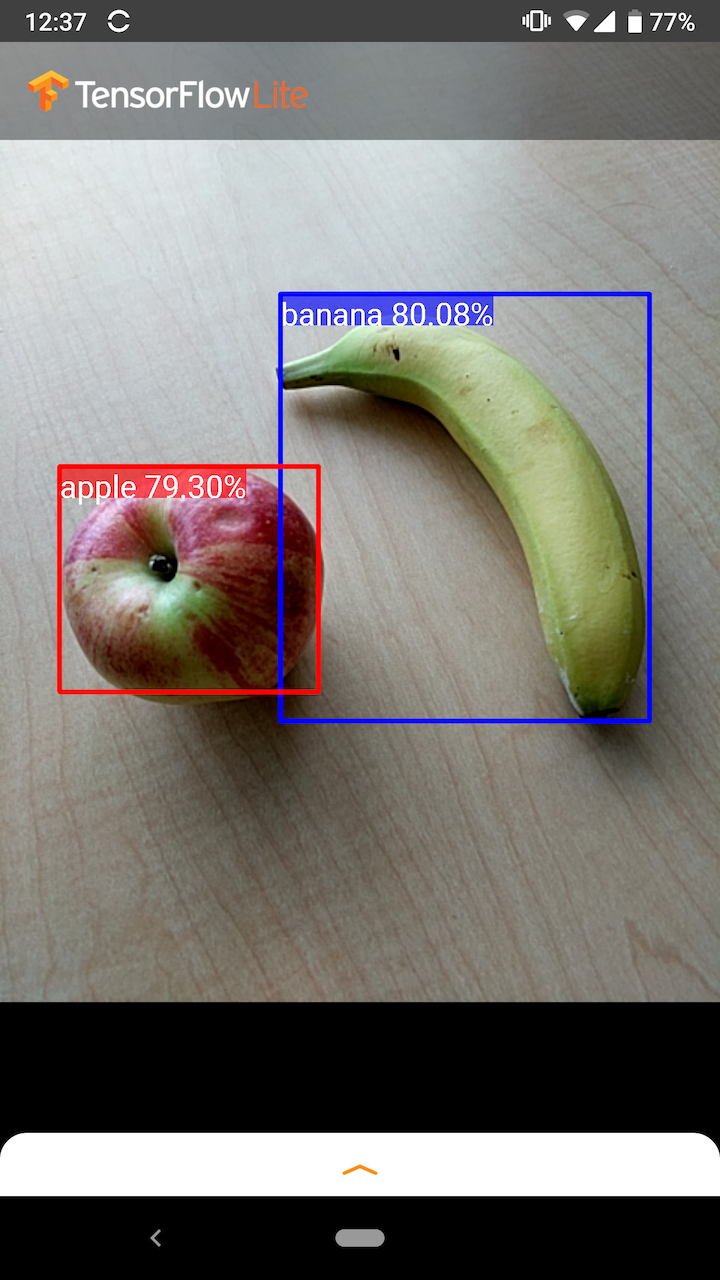
例如,此示例应用程序的屏幕截图显示了如何识别两个目标并注解它们的位置:

注:(1) 要集成现有模型,请尝试 TensorFlow Lite Task Library。(2) 要自定义模型,请尝试 TensorFlow Lite Model Maker。
开始使用
要了解如何在移动应用中使用目标检测,推荐查看我们的示例应用和指南。
如果您使用的不是 Android 或 iOS 平台,或者您已经熟悉 TensorFlow Lite API,则可以下载我们的入门目标检测模型和附带的标签。
有关元数据和相关字段(例如:labels.txt)的详细信息,请参阅从模型读取元数据。
如果要针对您自己的任务训练自定义检测模型,请参阅模型自定义。
针对以下用例,您应该使用不同的模型:
示例应用和指南
想象一下一个模块被训练用于检测苹果,香蕉和草莓。当我们输入一幅图片后,模块将会返回给我们一组本示例的检测结果。
Android
我们使用信任分数和所检测到目标的坐标来表示检测结果。分数反应了被检测到物体的可信度,范围在 0 和 1 之间。最大值为1,数值越大可信度越高。
下面的 Android 示例分别以 lib_task_api 和 lib_interpreter 形式演示了两个方法的实现。
使用裁切功能必须基于误判位置(物体识别错误或物体位置识别有误)或错误(由于可信度过低导致的物体未被捕捉)。 如下图所示,梨子(未被模块训练检测的物体)被误判为“人”。实例中的误判可以通过适当的图片裁切来忽略。在此示例中,裁剪 0.6 (或 60% )可以适当的排除误判。
iOS
针对每个被检测的物体,模块将会返回一个由四个数字组成的数组,该四个数字代表了围绕物体的一个矩形框。在我们提供的示例模块中,返回的数组中的元素按照如下顺序:
top 的值代表了矩形框的顶部距离图片上部的距离,单位为像素。 left 的值代表了矩形框的左边距离图片左边的距离。bottom 和 right 值的表示方法同理。 注意:目标检测模块接受特定尺寸的模型作为输入。这很有可能与您的图像设备生成的原始图片尺寸不同,所以您需要编写代码将原始图片缩放至模型可接受的尺寸(我们提供了 示范程序)。
模块输出的像素值表示在缩放后的图片中的位置,所以您需要调整调整原始图片等尺寸来保证正确。
何为物体检测?
本部分介绍了从 TensorFlow 目标检测 API 转换为 TensorFlow Lite 的单样本检测器模型的签名。
对目标检测模型进行训练以检测多类目标的存在和位置。例如,可以使用包含各种水果的图像以及指定它们所代表的水果类别(例如苹果、香蕉或草莓)的标签以及指定每个目标在图像中出现的位置的数据来训练模型。
当图像随后被提供给模型时,它将输出它检测到的目标的列表、包含每个目标的边界框的位置以及指示检测正确的置信度的分数。
输入签名
模型接收图像作为输入。
我们假设预期的图像是 300x300 像素,每个像素有三个通道(红、蓝和绿)。这应该作为 270,000 字节值 (300x300x3) 的扁平缓冲区提供给模型。如果模型是量化模型,则每个值都应该是表示 0 到 255 之间的值的单个字节。
您可以查看我们的示例应用代码,以了解如何在 Android 上执行此预处理。
输出签名
该模型会输出四个数组,映射到索引 0-4。数组 0、1 和 2 描述了 N 个检测到的目标,每个数组中的一个元素对应于每个目标。
| 索引 | 名称 | 描述 |
|---|---|---|
| 0 | 坐标 | 介于 0 和 1 之间的 [N][4] 浮点值的多维数组,内部数组以 [上,左,下,右] 的形式表示边界框 |
| 1 | 类 | 由 N 个整数组成的数组(输出为浮点值),每个整数表示标签文件中的类标签的索引 |
| 2 | 分数 | 由 0 到 1 之间的 N 个浮点值组成的数组,表示检测到类的概率 |
| 3 | 检测次数 | N 的整数值 |
注:结果数(上例中为 10)是将检测模型导出到 TensorFlow Lite 时设置的参数。有关更多详细信息,请参阅模型自定义。
例如,假设一个模特已经过检测苹果、香蕉和草莓的训练。当提供图像时,它将输出设定数量的检测结果(在本例中为 5)。
| 类别 | 分数 | 坐标 |
|---|---|---|
| 苹果 | 0.92 | [18, 21, 57, 63] |
| 香蕉 | 0.88 | [100, 30, 180, 150] |
| 草莓 | 0.87 | [7, 82, 89, 163] |
| 香蕉 | 0.23 | [42, 66, 57, 83] |
| 苹果 | 0.11 | [6, 42, 31, 58] |
信任分数
为了解释这些结果,我们可以查看每个检测到的目标的分数和坐标。该分数是介于 0 和 1 之间的数字,表示对该目标被真正检测到的置信度。数字越接近 1,模型的置信度就越高。
根据您的应用,您可以决定一个截止阈值,低于该阈值将丢弃检测结果。对于当前示例,合理的分界值为 0.5(意味着检测有效的概率为 50%)。在这种情况下,数组中的最后两个目标将被忽略,因为这些置信度分数低于 0.5:
| 类型 | 分数 | 坐标 |
|---|---|---|
| 苹果 | 0.92 | [18, 21, 57, 63] |
| 香蕉 | 0.88 | [100, 30, 180, 150] |
| 草莓 | 0.87 | [7, 82, 89, 163] |
| 香蕉 | 0.23 | [42, 66, 57, 83] |
| 苹果 | 0.11 | [6, 42, 31, 58] |
您可以检测到裁切的极限值并据此放弃检测结果,这取决于您的应用。 在我们的示例中,我们检测到裁切的极限值为 0.5 (这意味50%的检测是可信的)。在此示例中,我们将会忽略数组中最后两个目标,因为他们的信任分数低于了 0.5 。
例如,在下面的图像中,一个梨(它不是模型被训练来检测的目标)被错误地识别为了“人”。这是一个可以通过选择适当的截止值来忽略的假正例的例子。在这种情况下,0.6(或 60%)的临界值将轻松排除假正例。
坐标
对于每个检测到的目标,模型将返回一个由四个数字组成的数组,该数组表示围绕其位置的一个边界矩形。对于提供的入门模型,编号顺序如下:
| [ | top, | left, | bottom, | right | ] |
top 值表示矩形的顶边距图像顶部的距离,以像素为单位。left 值表示左侧边缘与输入图像左侧之间的距离。其他值以类似的方式表示下边缘和右边缘。
初始模型
| 模型名称 | 模型大小 | 设备 | GPU | CPU |
|---|---|---|---|---|
| COCO SSD MobileNet v1 | 27 Mb | Pixel 3 (Android 10) | 22ms | 46ms* |
| Pixel 4 (Android 10) | 20ms | 29ms* | ||
| iPhone XS (iOS 12.4.1) | 7.6ms | 11ms** |
物体检测模块最多能够在一张图中识别和定位10个物体。目前支持80种物体的识别,详细列表如下: model zip.
如果您需为识别新类型而训练模型,请参考 自定义模块.
模型自定义
用法和限制
在 Detection Zoo 中可以找到具有多种延迟和精度特性的移动端优化检测模型。其中的每个模型都遵循以下部分中描述的输入和输出签名。
大多数下载压缩包都包含一个 model.tflite 文件。如果没有,则可以使用这些指令生成 TensorFlow Lite 平面缓冲区。也可以根据此处的说明,将来自 TF2 Object Detection Zoo 的 SSD 模型转换为 TensorFlow Lite。需要注意的是,检测模型不能使用 TensorFlow Lite Converter 直接转换,因为它们需要一个中间步骤来生成对移动设备友好的源模型。上面链接的脚本会执行此步骤。
TF1 和 TF2 导出脚本都具有可启用更多输出对象或更慢、更准确的后处理的参数。请将 --help 与脚本一起使用,以查看支持的参数的详尽列表。
目前,设备端推断仅通过 SSD 模型进行优化。我们正在研究如何更好地支持其他架构,如 CenterNet 和 EfficientDet。
如何选择要自定义的模型?
每种模型都有自己的精度(通过 mAP 值量化)和延迟特性。您应该选择最适合您的用例和目标硬件的模型。例如,Edge TPU 模型非常适合在 Pixel 4 上推断 Google 的 Edge TPU。
您可以使用我们的基准测试工具评估模型并选择最高效的选项。
使用自定义数据对模型进行微调
我们提供的预训练模型在训练后可以检测 90 类目标。有关完整的类列表,请参阅模型元数据中的标签文件。
您可以使用一种称为迁移学习的技术来重新训练模型,以识别不在原始集合中的类。例如,您可以重新训练模型以检测多种蔬菜。为此,您需要为您希望训练的每个新标签提供一组训练图像。推荐的方式是使用 TensorFlow Lite Model Maker 库,该库只需几行代码即可简化使用自定义数据集训练 TensorFlow Lite 模型的过程。它使用迁移学习来减少所需的训练数据量和时间。您还可以学习少样本检测 Colab,作为微调只有几个样本的预训练模型的示例。
要对更大的数据集进行微调,请查看以下使用 TensorFlow 目标检测 API 训练您自己的模型的指南:TF1,TF2。经过训练后,可以按照以下说明将其转换为 TFLite 友好格式:TF1,TF2