
目标检测器可以识别可能存在已知的一组目标中的哪些目标,并提供它们在给定图像或视频流中的位置信息。目标检测器经过训练,可以检测多类目标的存在和位置。例如,可以用包含各种水果的图像,以及指定它们所代表水果类别(如苹果、香蕉或草莓)的标签和指定每个目标在图像中出现位置的数据来训练模型。请参阅目标检测概述,了解有关目标检测器的详细信息。
使用 Task Library ObjectDetector API 将自定义目标检测器或预训练的目标检测器部署到您的模型应用中。
ObjectDetector API 的主要功能
输入图像处理,包括旋转、调整大小和色彩空间转换。
标注映射区域。
筛选结果的分数阈值。
Top-k 检测结果。
标注允许列表和拒绝列表。
支持的物体检测器模型
以下模型保证可与 ObjectDetector API 兼容。
TensorFlow Hub 上的预训练物体检测模型。
由 AutoML Vision Edge Object Detection 创建的模型。
符合模型兼容性要求的自定义模型。
用 Java 运行推断
请参阅物体检测参考应用,获得如何在 Android 应用中使用 ObjectDetector 的示例。
步骤 1:导入 Gradle 依赖项和其他设置
将 .tflite 模型文件复制到将要运行模型的 Android 模块的资源目录下。指定不压缩该文件,并将 TensorFlow Lite 库添加到模块的 build.gradle 文件中。
android {
// Other settings
// Specify tflite file should not be compressed for the app apk
aaptOptions {
noCompress "tflite"
}
}
dependencies {
// Other dependencies
// Import the Task Vision Library dependency (NNAPI is included)
implementation 'org.tensorflow:tensorflow-lite-task-vision'
// Import the GPU delegate plugin Library for GPU inference
implementation 'org.tensorflow:tensorflow-lite-gpu-delegate-plugin'
}
注:从 Android Gradle 插件的 4.1 版开始,默认情况下,.tflite 将被添加到 noCompress 列表中,不再需要上面的 aaptOptions。
步骤 2:使用模型
// Initialization
ObjectDetectorOptions options =
ObjectDetectorOptions.builder()
.setBaseOptions(BaseOptions.builder().useGpu().build())
.setMaxResults(1)
.build();
ObjectDetector objectDetector =
ObjectDetector.createFromFileAndOptions(
context, modelFile, options);
// Run inference
List<Detection> results = objectDetector.detect(image);
有关配置 ObjectDetector 的更多选项,请参阅源代码和 Javadoc。
在 iOS 中运行推断
第 1 步:安装依赖项
Task Library 支持使用 CocoaPods 进行安装。请确保您的系统上已安装 CocoaPods。有关说明,请参阅 CocoaPods 安装指南。
有关向 Xcode 项目添加 Pod 的详细信息,请参阅 CocoaPods 指南。
在 Podfile 中添加 TensorFlowLiteTaskVision。
target 'MyAppWithTaskAPI' do
use_frameworks!
pod 'TensorFlowLiteTaskVision'
end
请确保您的应用捆绑包中存在用于推断的 .tflite 模型。
第 2 步:使用模型
Swift
// Imports
import TensorFlowLiteTaskVision
// Initialization
guard let modelPath = Bundle.main.path(forResource: "ssd_mobilenet_v1",
ofType: "tflite") else { return }
let options = ObjectDetectorOptions(modelPath: modelPath)
// Configure any additional options:
// options.classificationOptions.maxResults = 3
let detector = try ObjectDetector.detector(options: options)
// Convert the input image to MLImage.
// There are other sources for MLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
guard let image = UIImage (named: "cats_and_dogs.jpg"), let mlImage = MLImage(image: image) else { return }
// Run inference
let detectionResult = try detector.detect(mlImage: mlImage)
Objective C
// Imports
#import <TensorFlowLiteTaskVision/TensorFlowLiteTaskVision.h>
// Initialization
NSString *modelPath = [[NSBundle mainBundle] pathForResource:@"ssd_mobilenet_v1" ofType:@"tflite"];
TFLObjectDetectorOptions *options = [[TFLObjectDetectorOptions alloc] initWithModelPath:modelPath];
// Configure any additional options:
// options.classificationOptions.maxResults = 3;
TFLObjectDetector *detector = [TFLObjectDetector objectDetectorWithOptions:options
error:nil];
// Convert the input image to MLImage.
UIImage *image = [UIImage imageNamed:@"dogs.jpg"];
// There are other sources for GMLImage. For more details, please see:
// https://developers.google.com/ml-kit/reference/ios/mlimage/api/reference/Classes/GMLImage
GMLImage *gmlImage = [[GMLImage alloc] initWithImage:image];
// Run inference
TFLDetectionResult *detectionResult = [detector detectWithGMLImage:gmlImage error:nil];
请参阅源代码,了解有关配置 TFLObjectDetector 的更多选项。
用 Python 运行推断
第 1 步:安装 pip 软件包
pip install tflite-support
第 2 步:使用模型
# Imports
from tflite_support.task import vision
from tflite_support.task import core
from tflite_support.task import processor
# Initialization
base_options = core.BaseOptions(file_name=model_path)
detection_options = processor.DetectionOptions(max_results=2)
options = vision.ObjectDetectorOptions(base_options=base_options, detection_options=detection_options)
detector = vision.ObjectDetector.create_from_options(options)
# Alternatively, you can create an object detector in the following manner:
# detector = vision.ObjectDetector.create_from_file(model_path)
# Run inference
image = vision.TensorImage.create_from_file(image_path)
detection_result = detector.detect(image)
请参阅源代码,了解有关配置 ObjectDetector 的更多选项。
用 C++ 运行推断
// Initialization
ObjectDetectorOptions options;
options.mutable_base_options()->mutable_model_file()->set_file_name(model_path);
std::unique_ptr<ObjectDetector> object_detector = ObjectDetector::CreateFromOptions(options).value();
// Create input frame_buffer from your inputs, `image_data` and `image_dimension`.
// See more information here: tensorflow_lite_support/cc/task/vision/utils/frame_buffer_common_utils.h
std::unique_ptr<FrameBuffer> frame_buffer = CreateFromRgbRawBuffer(
image_data, image_dimension);
// Run inference
const DetectionResult result = object_detector->Detect(*frame_buffer).value();
有关配置 ObjectDetector 的更多选项,请参阅源代码。
结果示例
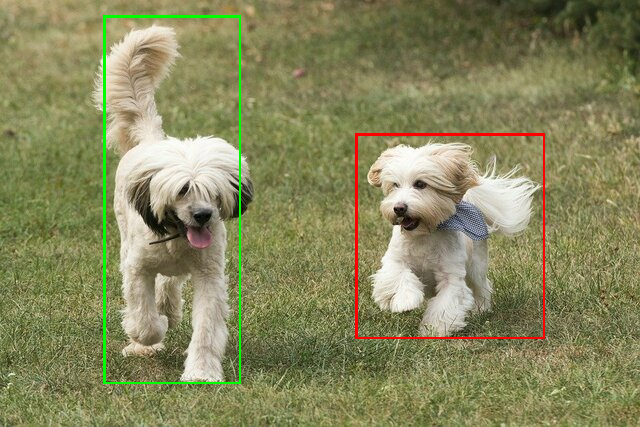
以下是来自 TensorFlow Hub 的 ssd mobilenet v1 的检测结果示例。

Results:
Detection #0 (red):
Box: (x: 355, y: 133, w: 190, h: 206)
Top-1 class:
index : 17
score : 0.73828
class name : dog
Detection #1 (green):
Box: (x: 103, y: 15, w: 138, h: 369)
Top-1 class:
index : 17
score : 0.73047
class name : dog
将边界框呈现在输入图像上:
用您自己的模型和测试数据试用简单的 ObjectDetector CLI 演示工具。
模型兼容性要求
ObjectDetector API 需要具有强制性 TFLite Model Metadata 的 TFLite 模型。请参阅使用 TensorFlow Lite Metadata Writer API 为目标检测器创建元数据的示例。
兼容的物体检测模型应满足以下要求:
输入图像张量:(kTfLiteUInt8/kTfLiteFloat32)
- 图像输入大小为
[batch x height x width x channels]。 - 不支持批量推断(
batch必须为 1)。 - 仅支持 RGB 输入(
channels必须为 3)。 - 如果类型为 kTfLiteFloat32,则必须将 NormalizationOptions 附加到元数据以进行输入归一化。
- 图像输入大小为
输出张量必须是
DetectionPostProcess算子的 4 个输出,即:区域张量 (kTfLiteFloat32)
- 大小为
[1 x num_results x 4]的张量,内部数组表示边界框,形式为 [top,left,right,bottom]。 - 必须将 BoundingBoxProperties 附加到元数据,且必须指定
type=BOUNDARIES和 `coordinate_type = RATIO。
- 大小为
类张量 (kTfLiteFloat32)
- 大小为
[1 x num_results]的张量,每个值代表一个类的整数索引。 - 可选的(但推荐)标签映射可作为 AssociatedFile-s 进行附加,类型为 TENSOR_VALUE_LABELS,每行包含一个标签。请参阅示例标签文件。第一个此类 AssociatedFile (如果有)用于填充结果的
class_name字段。display_name字段由其区域与创建时所用的ObjectDetectorOptions的display_names_locale字段(默认为“en”,即英语)相匹配的 AssociatedFile(如果有)填充。如果上述选项均不可用,将仅填充结果中的index字段。
- 大小为
分数张量 (kTfLiteFloat32)
- 大小为
[1 x num_results]的张量,每个值代表检测到的物体的分数。
- 大小为
检测张量的数量 (kTfLiteFloat32)
- 整数 num_results 作为大小为
[1]的张量。
- 整数 num_results 作为大小为