
| |
|
 在 Github 上查看源代码 在 Github 上查看源代码
|
|
简介
此笔记本使用 TensorFlow Core 低级 API 和 DTensor 来演示数据并行分布式训练示例。访问 Core API 概述以详细了解 TensorFlow Core 及其预期用例。请参阅 DTensor 概述指南和使用 DTensor 进行分布式训练教程以详细了解 DTensor。
本示例使用多层感知器教程中显示的相同模型和优化器。首先请参阅本教程,以熟悉使用 Core API 编写端到端机器学习工作流。
注:DTensor 仍然是一个实验性 TensorFlow API,这意味着它的功能可用于测试,并且仅用于测试环境。
使用 DTensor 进行数据并行训练的概述
在构建支持分布的 MLP 之前,花点时间探索 DTensor 用于数据并行训练的基础知识。
DTensor 允许您跨设备运行分布式训练,以提高效率、可靠性和可扩缩性。DTensor 通过称为单程序多数据 (SPMD) 扩展的过程根据分片指令分布程序和张量。DTensor 感知层的变量被创建为 dtensor.DVariable,除了通常的层参数外,DTensor 感知层对象的构造函数还接受额外的 Layout 输入。
数据并行训练的主要思路如下:
- 分别在 N 台设备上复制模型变量。
- 将全局批次拆分成 N 个按副本批次。
- 每个按副本批次都在副本设备上进行训练。
- 在对所有副本共同执行数据加权之前进行梯度归约。
- 数据并行训练能够根据设备数量提供近乎线性的速度。
安装
DTensor 是 TensorFlow 2.9.0 版本的一部分。
#!pip install --quiet --upgrade --pre tensorflow
import matplotlib
from matplotlib import pyplot as plt
# Preset Matplotlib figure sizes.
matplotlib.rcParams['figure.figsize'] = [9, 6]
import tensorflow as tf
import tensorflow_datasets as tfds
from tensorflow.experimental import dtensor
print(tf.__version__)
# Set random seed for reproducible results
tf.random.set_seed(22)
2022-12-14 22:16:35.273675: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer.so.7'; dlerror: libnvinfer.so.7: cannot open shared object file: No such file or directory 2022-12-14 22:16:35.273768: W tensorflow/compiler/xla/stream_executor/platform/default/dso_loader.cc:64] Could not load dynamic library 'libnvinfer_plugin.so.7'; dlerror: libnvinfer_plugin.so.7: cannot open shared object file: No such file or directory 2022-12-14 22:16:35.273778: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Cannot dlopen some TensorRT libraries. If you would like to use Nvidia GPU with TensorRT, please make sure the missing libraries mentioned above are installed properly. 2.11.0
为本实验配置 8 个虚拟 CPU。DTensor 也可以与 GPU 或 TPU 设备一起使用。鉴于此笔记本使用虚拟设备,分布式训练所获得的加速效果并不明显。
def configure_virtual_cpus(ncpu):
phy_devices = tf.config.list_physical_devices('CPU')
tf.config.set_logical_device_configuration(phy_devices[0], [
tf.config.LogicalDeviceConfiguration(),
] * ncpu)
configure_virtual_cpus(8)
DEVICES = [f'CPU:{i}' for i in range(8)]
devices = tf.config.list_logical_devices('CPU')
device_names = [d.name for d in devices]
device_names
['/device:CPU:0', '/device:CPU:1', '/device:CPU:2', '/device:CPU:3', '/device:CPU:4', '/device:CPU:5', '/device:CPU:6', '/device:CPU:7']
MNIST 数据集
可从 TensorFlow Datasets 获得该数据集。将数据拆分为训练集和测试集。仅使用 5000 个样本进行训练和测试以节省时间。
train_data, test_data = tfds.load("mnist", split=['train[:5000]', 'test[:5000]'], batch_size=128, as_supervised=True)
预处理数据
通过将数据的形状改变为二维并重新缩放数据以适合单位区间 [0,1] 来预处理数据。
def preprocess(x, y):
# Reshaping the data
x = tf.reshape(x, shape=[-1, 784])
# Rescaling the data
x = x/255
return x, y
train_data, test_data = train_data.map(preprocess), test_data.map(preprocess)
构建 MLP
使用 DTensor 感知层构建 MLP 模型。
密集层
首先创建一个支持 DTensor 的密集层模块。dtensor.call_with_layout 函数可用于调用接受 DTensor 输入并产生 DTensor 输出的函数。这对于使用 TensorFlow 支持的函数初始化 DTensor 变量 dtensor.DVariable 十分有用。
class DenseLayer(tf.Module):
def __init__(self, in_dim, out_dim, weight_layout, activation=tf.identity):
super().__init__()
# Initialize dimensions and the activation function
self.in_dim, self.out_dim = in_dim, out_dim
self.activation = activation
# Initialize the DTensor weights using the Xavier scheme
uniform_initializer = tf.function(tf.random.stateless_uniform)
xavier_lim = tf.sqrt(6.)/tf.sqrt(tf.cast(self.in_dim + self.out_dim, tf.float32))
self.w = dtensor.DVariable(
dtensor.call_with_layout(
uniform_initializer, weight_layout,
shape=(self.in_dim, self.out_dim), seed=(22, 23),
minval=-xavier_lim, maxval=xavier_lim))
# Initialize the bias with the zeros
bias_layout = weight_layout.delete([0])
self.b = dtensor.DVariable(
dtensor.call_with_layout(tf.zeros, bias_layout, shape=[out_dim]))
def __call__(self, x):
# Compute the forward pass
z = tf.add(tf.matmul(x, self.w), self.b)
return self.activation(z)
MLP 序贯模型
现在,创建一个按顺序执行密集层的 MLP 模块。
class MLP(tf.Module):
def __init__(self, layers):
self.layers = layers
def __call__(self, x, preds=False):
# Execute the model's layers sequentially
for layer in self.layers:
x = layer(x)
return x
使用 DTensor 执行“数据并行”训练等效于 tf.distribute.MirroredStrategy。为此,每个设备将在数据批次的一个分片上运行相同的模型。因此,您将需要以下各项:
- 具有单个
"batch"维度的dtensor.Mesh - 用于在网格中复制(对每个轴使用
dtensor.UNSHARDED)的所有权重的dtensor.Layout - 用于在网格中拆分批次维度的数据的
dtensor.Layout
创建一个包含单个批次维度的 DTensor 网格,其中每个设备都成为从全局批次接收分片的副本。使用此网格实例化具有以下架构的 MLP 模式:
前向传递:ReLU(784 x 700) x ReLU(700 x 500) x Softmax(500 x 10)
mesh = dtensor.create_mesh([("batch", 8)], devices=DEVICES)
weight_layout = dtensor.Layout([dtensor.UNSHARDED, dtensor.UNSHARDED], mesh)
input_size = 784
hidden_layer_1_size = 700
hidden_layer_2_size = 500
hidden_layer_2_size = 10
mlp_model = MLP([
DenseLayer(in_dim=input_size, out_dim=hidden_layer_1_size,
weight_layout=weight_layout,
activation=tf.nn.relu),
DenseLayer(in_dim=hidden_layer_1_size , out_dim=hidden_layer_2_size,
weight_layout=weight_layout,
activation=tf.nn.relu),
DenseLayer(in_dim=hidden_layer_2_size, out_dim=hidden_layer_2_size,
weight_layout=weight_layout)])
训练指标
使用交叉熵损失函数和准确率指标进行训练。
def cross_entropy_loss(y_pred, y):
# Compute cross entropy loss with a sparse operation
sparse_ce = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=y, logits=y_pred)
return tf.reduce_mean(sparse_ce)
def accuracy(y_pred, y):
# Compute accuracy after extracting class predictions
class_preds = tf.argmax(y_pred, axis=1)
is_equal = tf.equal(y, class_preds)
return tf.reduce_mean(tf.cast(is_equal, tf.float32))
优化器
与标准梯度下降相比,使用优化器可以显著加快收敛速度。Adam 优化器在下面实现,并已配置为与 DTensor 兼容。要将 Keras 优化器与 DTensor 一起使用,请参阅实验性 tf.keras.dtensor.experimental.optimizers 模块。
class Adam(tf.Module):
def __init__(self, model_vars, learning_rate=1e-3, beta_1=0.9, beta_2=0.999, ep=1e-7):
# Initialize optimizer parameters and variable slots
self.model_vars = model_vars
self.beta_1 = beta_1
self.beta_2 = beta_2
self.learning_rate = learning_rate
self.ep = ep
self.t = 1.
self.v_dvar, self.s_dvar = [], []
# Initialize optimizer variable slots
for var in model_vars:
v = dtensor.DVariable(dtensor.call_with_layout(tf.zeros, var.layout, shape=var.shape))
s = dtensor.DVariable(dtensor.call_with_layout(tf.zeros, var.layout, shape=var.shape))
self.v_dvar.append(v)
self.s_dvar.append(s)
def apply_gradients(self, grads):
# Update the model variables given their gradients
for i, (d_var, var) in enumerate(zip(grads, self.model_vars)):
self.v_dvar[i].assign(self.beta_1*self.v_dvar[i] + (1-self.beta_1)*d_var)
self.s_dvar[i].assign(self.beta_2*self.s_dvar[i] + (1-self.beta_2)*tf.square(d_var))
v_dvar_bc = self.v_dvar[i]/(1-(self.beta_1**self.t))
s_dvar_bc = self.s_dvar[i]/(1-(self.beta_2**self.t))
var.assign_sub(self.learning_rate*(v_dvar_bc/(tf.sqrt(s_dvar_bc) + self.ep)))
self.t += 1.
return
数据打包
首先,编写一个用于将数据传输到设备的辅助函数。此函数应使用 dtensor.pack 将用于副本的全局批次的分片发送(并且仅发送)到支持副本的设备。为简单起见,假设采用一个单客户端应用。
接下来,编写一个函数,它使用此辅助函数将训练数据批次打包到沿批次(第一个)轴分片的 DTensor 中。这可确保 DTensor 将训练数据均匀分布到“批次”网格维度。请注意,在 DTensor 中,批次大小始终指全局批次大小;因此,批次大小的选择应使其可以被批次网格维度的大小均匀拆分。计划使用其他 DTensor API 来简化 tf.data 集成,敬请期待。
def repack_local_tensor(x, layout):
# Repacks a local Tensor-like to a DTensor with layout
# This function assumes a single-client application
x = tf.convert_to_tensor(x)
sharded_dims = []
# For every sharded dimension, use tf.split to split the along the dimension.
# The result is a nested list of split-tensors in queue[0].
queue = [x]
for axis, dim in enumerate(layout.sharding_specs):
if dim == dtensor.UNSHARDED:
continue
num_splits = layout.shape[axis]
queue = tf.nest.map_structure(lambda x: tf.split(x, num_splits, axis=axis), queue)
sharded_dims.append(dim)
# Now we can build the list of component tensors by looking up the location in
# the nested list of split-tensors created in queue[0].
components = []
for locations in layout.mesh.local_device_locations():
t = queue[0]
for dim in sharded_dims:
split_index = locations[dim] # Only valid on single-client mesh.
t = t[split_index]
components.append(t)
return dtensor.pack(components, layout)
def repack_batch(x, y, mesh):
# Pack training data batches into DTensors along the batch axis
x = repack_local_tensor(x, layout=dtensor.Layout(['batch', dtensor.UNSHARDED], mesh))
y = repack_local_tensor(y, layout=dtensor.Layout(['batch'], mesh))
return x, y
训练
编写一个可跟踪的函数,在给定一批数据的情况下执行单个训练步骤。此函数不需要任何特殊的 DTensor 注解。此外,还要编写一个执行测试步骤并返回适当性能指标的函数。
@tf.function
def train_step(model, x_batch, y_batch, loss, metric, optimizer):
# Execute a single training step
with tf.GradientTape() as tape:
y_pred = model(x_batch)
batch_loss = loss(y_pred, y_batch)
# Compute gradients and update the model's parameters
grads = tape.gradient(batch_loss, model.trainable_variables)
optimizer.apply_gradients(grads)
# Return batch loss and accuracy
batch_acc = metric(y_pred, y_batch)
return batch_loss, batch_acc
@tf.function
def test_step(model, x_batch, y_batch, loss, metric):
# Execute a single testing step
y_pred = model(x_batch)
batch_loss = loss(y_pred, y_batch)
batch_acc = metric(y_pred, y_batch)
return batch_loss, batch_acc
现在,以 128 为批次大小对 MLP 模型训练 3 个周期。
# Initialize the training loop parameters and structures
epochs = 3
batch_size = 128
train_losses, test_losses = [], []
train_accs, test_accs = [], []
optimizer = Adam(mlp_model.trainable_variables)
# Format training loop
for epoch in range(epochs):
batch_losses_train, batch_accs_train = [], []
batch_losses_test, batch_accs_test = [], []
# Iterate through training data
for x_batch, y_batch in train_data:
x_batch, y_batch = repack_batch(x_batch, y_batch, mesh)
batch_loss, batch_acc = train_step(mlp_model, x_batch, y_batch, cross_entropy_loss, accuracy, optimizer)
# Keep track of batch-level training performance
batch_losses_train.append(batch_loss)
batch_accs_train.append(batch_acc)
# Iterate through testing data
for x_batch, y_batch in test_data:
x_batch, y_batch = repack_batch(x_batch, y_batch, mesh)
batch_loss, batch_acc = test_step(mlp_model, x_batch, y_batch, cross_entropy_loss, accuracy)
# Keep track of batch-level testing
batch_losses_test.append(batch_loss)
batch_accs_test.append(batch_acc)
# Keep track of epoch-level model performance
train_loss, train_acc = tf.reduce_mean(batch_losses_train), tf.reduce_mean(batch_accs_train)
test_loss, test_acc = tf.reduce_mean(batch_losses_test), tf.reduce_mean(batch_accs_test)
train_losses.append(train_loss)
train_accs.append(train_acc)
test_losses.append(test_loss)
test_accs.append(test_acc)
print(f"Epoch: {epoch}")
print(f"Training loss: {train_loss.numpy():.3f}, Training accuracy: {train_acc.numpy():.3f}")
print(f"Testing loss: {test_loss.numpy():.3f}, Testing accuracy: {test_acc.numpy():.3f}")
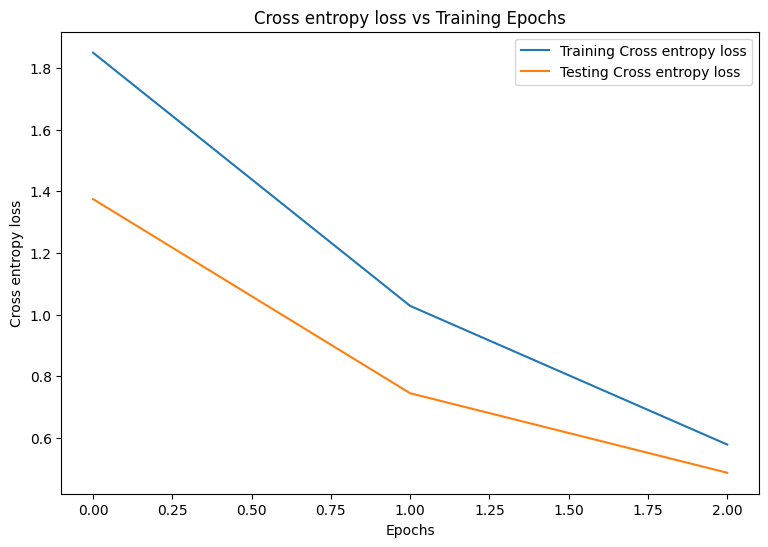
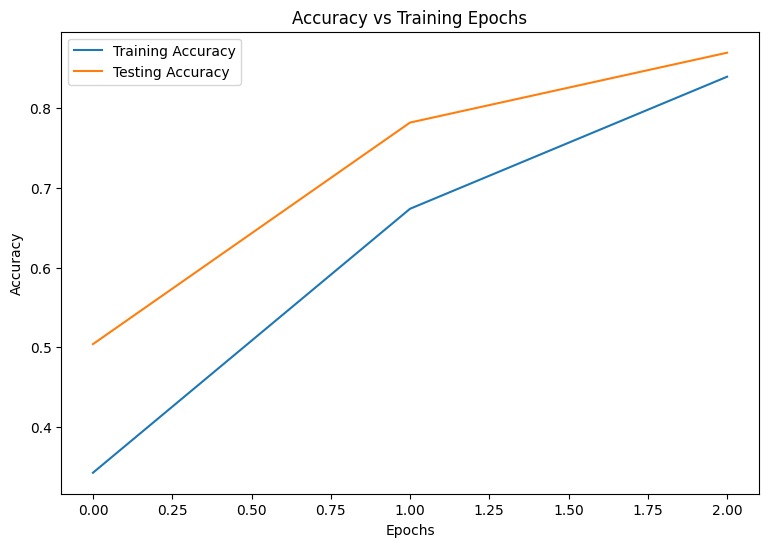
Epoch: 0 Training loss: 1.850, Training accuracy: 0.343 Testing loss: 1.375, Testing accuracy: 0.504 Epoch: 1 Training loss: 1.028, Training accuracy: 0.674 Testing loss: 0.744, Testing accuracy: 0.782 Epoch: 2 Training loss: 0.578, Training accuracy: 0.839 Testing loss: 0.486, Testing accuracy: 0.869
性能评估
首先,编写一个绘图函数来呈现模型在训练期间的损失和准确率。
def plot_metrics(train_metric, test_metric, metric_type):
# Visualize metrics vs training Epochs
plt.figure()
plt.plot(range(len(train_metric)), train_metric, label = f"Training {metric_type}")
plt.plot(range(len(test_metric)), test_metric, label = f"Testing {metric_type}")
plt.xlabel("Epochs")
plt.ylabel(metric_type)
plt.legend()
plt.title(f"{metric_type} vs Training Epochs");
plot_metrics(train_losses, test_losses, "Cross entropy loss")
plot_metrics(train_accs, test_accs, "Accuracy")
保存模型
tf.saved_model 和 DTensor 的集成仍在开发中。从 TensorFlow 2.9.0 开始,tf.saved_model 仅接受具有完全复制变量的 DTensor 模型。作为替代方法,您可以通过重新加载检查点将 DTensor 模型转换为完全复制的模型。但是,保存模型后,所有 DTensor 注解都会丢失,保存的签名只能与常规张量一起使用。本教程将在固化后进行更新以展示集成。
结论
此笔记本概括介绍了如何使用 DTensor 和 TensorFlow Core API 进行分布式训练。下面是一些可能有所帮助的提示:
- TensorFlow Core API 可用于构建具有高度可配置性的机器学习工作流,并支持分布式训练。
- DTensor 概念指南和使用 DTensor 进行分布式训练教程包含有关 DTensor 及其集成的最新信息。
有关使用 TensorFlow Core API 的更多示例,请查阅指南。如果您想详细了解如何加载和准备数据,请参阅有关图像数据加载或 CSV 数据加载的教程。