
 在 GitHub 上查看源代码 在 GitHub 上查看源代码 |
|
隐变量模型会试图捕获高维数据中的隐藏结构。示例包括主分量分析 (PCA) 和因子分析。高斯过程是“非参数”模型,可以灵活地捕获局部相关结构和不确定度。高斯过程隐变量模型 (Lawrence, 2004) 结合了这些概念。
背景:高斯过程
高斯过程是随机变量的任何集合,因此在任何有限子集上的边缘分布都是多元正态分布。如需详细了解回归上下文中的 GP,请查看 TensorFlow Probability 中的高斯过程回归。
我们使用所谓的索引集来标记 GP 所组成的集合中的每一个随机变量。在有限索引集的情况下,我们只会得到一个多元正态分布。然而,当我们考虑有限集合时,GP 最有趣。对于类似 \(\mathbb{R}^D\) 的索引集(其中,我们对\(D\) 维空间中的每个点都有一个随机变量),可以将 GP 视为随机函数上的分布。如果可以实现,从这样的 GP 中进行单次抽样,将为 \(\mathbb{R}^D\) 中的每个点分配一个(联合正态分布的)值。在此 Colab 中,我们将关注一些 \(\mathbb{R}^D\) 上的 GP。
正态分布完全由其一阶和二阶统计量确定,实际上,定义正态分布的一种方式是使其高阶累积量全部为零。GP 也是如此:我们可以通过描述均值和协方差来完全指定 GP。回想一下,对于有限维多元正态分布,均值是一个向量,协方差是一个方形的对称正定矩阵。在无限维 GP 中,这些结构会泛化为均值函数* \(m : \mathbb{R}^D \to \mathbb{R}\)(在索引集的每个点上定义),以及协方差“内核”函数,\(k : \mathbb{R}^D \times \mathbb{R}^D \to \mathbb{R}\)。内核函数必须为正定,本质上是说,在有限点集合的限制下,它会产生一个正定矩阵。
GP 的大部分结构都衍生自其协方差内核函数,此函数描述了采样函数的值如何在邻近(或不那么邻近)点之间变化。不同的协方差函数会鼓励不同程度的平滑度。一种常用的内核函数是“指数二次函数”(又称“高斯函数”、“平方指数函数”或“径向基函数”),\(k(x, x') = \sigma^2 e^{(x - x^2) / \lambda^2}\)。其他示例在 David Duvenaud 的 Kernel Cookbook 页面和典籍 Gaussian Processes for Machine Learning 中均有概述。
* 对于无限索引集,我们还需要一个一致性条件。由于 GP 的定义是有限边缘,因此我们必须要求这些边缘是一致的,而不考虑边缘采用的顺序。这在随机过程理论中是一个比较高级的话题,不在本教程的讨论范围内;只要事情最终得到解决即可!
应用 GP:回归和隐变量模型
使用 GP 的一种方式是回归:给定一组观测数据,其形式为输入 \({x_i}*{i=1}^N\)(索引集的元素)和观测值 \({y_i}*{i=1}^N\),我们可以使用这些数据在新的点集 \({x_j^*}_{j=1}^M\) 处形成一个后验预测分布。由于分布都是高斯分布,因此可以归结为一些简单的线性代数(但请注意:必要的计算在数据点数量上具有运行时立方,并且在数据点数量上需要空间二次,这是使用 GP 的一个主要限制因素,目前的很多研究都集中在精确后验推断的计算上可行的替代方式上)。我们在 TFP Colab 中的 GP 回归中更详细地介绍了 GP 回归。
使用 GP 的另一种方式是作为隐变量模型:给定高维观测值(例如,图像)的集合,我们可以设想某种低维隐结构。我们假设,在隐结构的条件下,大量的输出(图像中的像素)彼此独立。此模型中的训练包括:
- 优化模型参数(例如,内核函数参数和观测噪声方差),以及
- 在索引集中为每个训练观测值(图像)找到对应的点位置。所有优化都可以通过最大化数据的边缘对数似然来完成。
导入
import numpy as np
import tensorflow.compat.v2 as tf
tf.enable_v2_behavior()
import tensorflow_probability as tfp
tfd = tfp.distributions
tfk = tfp.math.psd_kernels
%pylab inline
Populating the interactive namespace from numpy and matplotlib
加载 MNIST 数据
# Load the MNIST data set and isolate a subset of it.
(x_train, y_train), (_, _) = tf.keras.datasets.mnist.load_data()
N = 1000
small_x_train = x_train[:N, ...].astype(np.float64) / 256.
small_y_train = y_train[:N]
Downloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/mnist.npz 11493376/11490434 [==============================] - 0s 0us/step 11501568/11490434 [==============================] - 0s 0us/step
准备可训练变量
我们将联合训练 3 个模型参数以及隐输入。
# Create some trainable model parameters. We will constrain them to be strictly
# positive when constructing the kernel and the GP.
unconstrained_amplitude = tf.Variable(np.float64(1.), name='amplitude')
unconstrained_length_scale = tf.Variable(np.float64(1.), name='length_scale')
unconstrained_observation_noise = tf.Variable(np.float64(1.), name='observation_noise')
# We need to flatten the images and, somewhat unintuitively, transpose from
# shape [100, 784] to [784, 100]. This is because the 784 pixels will be
# treated as *independent* conditioned on the latent inputs, meaning we really
# have a batch of 784 GP's with 100 index_points.
observations_ = small_x_train.reshape(N, -1).transpose()
# Create a collection of N 2-dimensional index points that will represent our
# latent embeddings of the data. (Lawrence, 2004) prescribes initializing these
# with PCA, but a random initialization actually gives not-too-bad results, so
# we use this for simplicity. For a fun exercise, try doing the
# PCA-initialization yourself!
init_ = np.random.normal(size=(N, 2))
latent_index_points = tf.Variable(init_, name='latent_index_points')
构造模型和训练运算
# Create our kernel and GP distribution
EPS = np.finfo(np.float64).eps
def create_kernel():
amplitude = tf.math.softplus(EPS + unconstrained_amplitude)
length_scale = tf.math.softplus(EPS + unconstrained_length_scale)
kernel = tfk.ExponentiatedQuadratic(amplitude, length_scale)
return kernel
def loss_fn():
observation_noise_variance = tf.math.softplus(
EPS + unconstrained_observation_noise)
gp = tfd.GaussianProcess(
kernel=create_kernel(),
index_points=latent_index_points,
observation_noise_variance=observation_noise_variance)
log_probs = gp.log_prob(observations_, name='log_prob')
return -tf.reduce_mean(log_probs)
trainable_variables = [unconstrained_amplitude,
unconstrained_length_scale,
unconstrained_observation_noise,
latent_index_points]
optimizer = tf.optimizers.Adam(learning_rate=1.0)
@tf.function(autograph=False, jit_compile=True)
def train_model():
with tf.GradientTape() as tape:
loss_value = loss_fn()
grads = tape.gradient(loss_value, trainable_variables)
optimizer.apply_gradients(zip(grads, trainable_variables))
return loss_value
训练并绘制生成的隐嵌入向量
# Initialize variables and train!
num_iters = 100
log_interval = 20
lips = np.zeros((num_iters, N, 2), np.float64)
for i in range(num_iters):
loss = train_model()
lips[i] = latent_index_points.numpy()
if i % log_interval == 0 or i + 1 == num_iters:
print("Loss at step %d: %f" % (i, loss))
Loss at step 0: 1108.121688 Loss at step 20: -159.633761 Loss at step 40: -263.014394 Loss at step 60: -283.713056 Loss at step 80: -288.709413 Loss at step 99: -289.662253
绘制结果
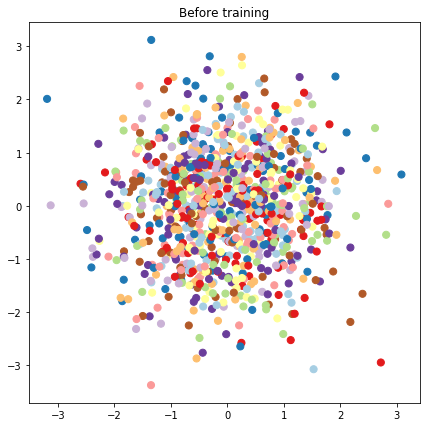
# Plot the latent locations before and after training
plt.figure(figsize=(7, 7))
plt.title("Before training")
plt.grid(False)
plt.scatter(x=init_[:, 0], y=init_[:, 1],
c=y_train[:N], cmap=plt.get_cmap('Paired'), s=50)
plt.show()
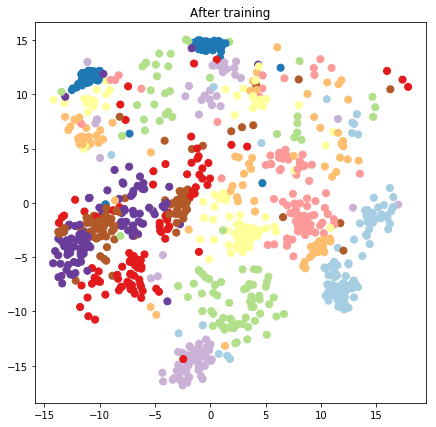
plt.figure(figsize=(7, 7))
plt.title("After training")
plt.grid(False)
plt.scatter(x=lips[-1, :, 0], y=lips[-1, :, 1],
c=y_train[:N], cmap=plt.get_cmap('Paired'), s=50)
plt.show()
构造预测模型和采样运算
# We'll draw samples at evenly spaced points on a 10x10 grid in the latent
# input space.
sample_grid_points = 10
grid_ = np.linspace(-4, 4, sample_grid_points).astype(np.float64)
# Create a 10x10 grid of 2-vectors, for a total shape [10, 10, 2]
grid_ = np.stack(np.meshgrid(grid_, grid_), axis=-1)
# This part's a bit subtle! What we defined above was a batch of 784 (=28x28)
# independent GP distributions over the input space. Each one corresponds to a
# single pixel of an MNIST image. Now what we'd like to do is draw 100 (=10x10)
# *independent* samples, each one separately conditioned on all the observations
# as well as the learned latent input locations above.
#
# The GP regression model below will define a batch of 784 independent
# posteriors. We'd like to get 100 independent samples each at a different
# latent index point. We could loop over the points in the grid, but that might
# be a bit slow. Instead, we can vectorize the computation by tacking on *even
# more* batch dimensions to our GaussianProcessRegressionModel distribution.
# In the below grid_ shape, we have concatentaed
# 1. batch shape: [sample_grid_points, sample_grid_points, 1]
# 2. number of examples: [1]
# 3. number of latent input dimensions: [2]
# The `1` in the batch shape will broadcast with 784. The final result will be
# samples of shape [10, 10, 784, 1]. The `1` comes from the "number of examples"
# and we can just `np.squeeze` it off.
grid_ = grid_.reshape(sample_grid_points, sample_grid_points, 1, 1, 2)
# Create the GPRegressionModel instance which represents the posterior
# predictive at the grid of new points.
gprm = tfd.GaussianProcessRegressionModel(
kernel=create_kernel(),
# Shape [10, 10, 1, 1, 2]
index_points=grid_,
# Shape [1000, 2]. 1000 2 dimensional vectors.
observation_index_points=latent_index_points,
# Shape [784, 1000]. A batch of 784 1000-dimensional observations.
observations=observations_)
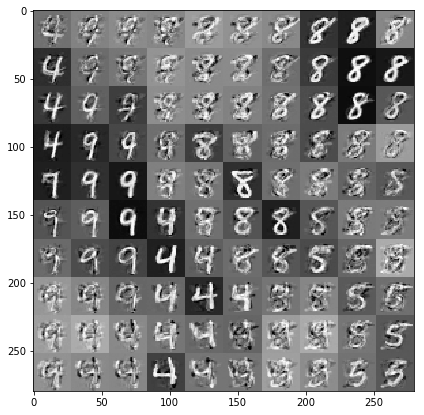
以数据和隐嵌入向量为条件抽取样本
我们在隐空间的二维网格上对 100 个点进行采样。
samples = gprm.sample()
# Plot the grid of samples at new points. We do a bit of tweaking of the samples
# first, squeezing off extra 1-shapes and normalizing the values.
samples_ = np.squeeze(samples.numpy())
samples_ = ((samples_ -
samples_.min(-1, keepdims=True)) /
(samples_.max(-1, keepdims=True) -
samples_.min(-1, keepdims=True)))
samples_ = samples_.reshape(sample_grid_points, sample_grid_points, 28, 28)
samples_ = samples_.transpose([0, 2, 1, 3])
samples_ = samples_.reshape(28 * sample_grid_points, 28 * sample_grid_points)
plt.figure(figsize=(7, 7))
ax = plt.subplot()
ax.grid(False)
ax.imshow(-samples_, interpolation='none', cmap='Greys')
plt.show()
结论
我们简要介绍了高斯过程潜变量模型,并展示了如何仅用几行 TF 和 TF Probability 代码实现它。