
| |
 在 Github 上查看源代码 在 Github 上查看源代码 |
|
在此 Colab 中,我们将使用 TensorFlow 和 TensorFlow Probability 探索高斯过程回归。我们从一些已知函数中生成一些噪声观测值,并将 GP 模型拟合到这些数据。然后,我们从 GP 后验中采样,并将采样函数值绘制在其域中的网格上。
背景
假设 \(\mathcal{X}\) 为任意集合。高斯过程 (GP) 是由 \(\mathcal{X}\) 索引的随机变量的集合,因此,如果 \({X_1, \ldots, X_n} \subset \mathcal{X}\) 是任意有限子集,边缘密度 \(p(X_1 = x_1, \ldots, X_n = x_n)\) 为多元高斯。任何高斯分布均由其第一和第二中心矩(均值和协方差)完全指定,GP 也不例外。我们可以用它的均值函数 \(\mu : \mathcal{X} \to \mathbb{R}\) 和协方差函数 \(k : \mathcal{X} \times \mathcal{X} \to \mathbb{R}\) 来完全指定 GP。GP 的大部分表达能力都体现在协方差函数的选择中。由于各种原因,协方差函数也被称为内核函数。仅要求其对称和正定(请参阅 Rasmussen & Williams 所著图书的第 4 章)。下面我们使用 ExponentiatedQuadratic 协方差内核。它的形式为:
\[ k(x, x') := \sigma^2 \exp \left( \frac{|x - x'|^2}{\lambda^2} \right) \]
其中,\(\sigma^2\) 称为“幅值”,\(\lambda\) 称为长度尺度。可以通过最大似然优化程序来选择内核参数。
来自 GP 的完整样本由整个空间 \(\mathcal{X}\) 上的实值函数组成,这在实践中不切实际;通常,我们会选择一组点来观察样本,并在这些点上对函数值进行抽样。这是通过从适当的(有限维)多元高斯中进行采样来实现的。
请注意,根据上文的定义,任何有限维的多元高斯分布也是高斯过程。通常,当我们提到 GP 时,都隐含索引集为某个 \(\mathbb{R}^n\),我们在这里确实会做这样的假设。
高斯过程在机器学习中的一个常见应用是高斯过程回归。其思想是,我们希望在给定有限数量的点 \({x_1, \ldots x_N}\) 处函数的噪声观测值 \({y_1, \ldots, y_N}\) 的情况下,估算出未知函数。我们想象一个生成式过程:
\[ \begin{align} f \sim : & \textsf{GaussianProcess}\left( \text{mean_fn}=\mu(x), \text{covariance_fn}=k(x, x')\right) \ y_i \sim : & \textsf{Normal}\left( \text{loc}=f(x_i), \text{scale}=\sigma\right), i = 1, \ldots, N \end{align} \]
如上所述,采样函数无法计算,因为我们需要它在无穷多个点处的值。因此,我们可以考虑从多元高斯中抽取有限样本。
\[ \begin{gather} \begin{bmatrix} f(x_1) \ \vdots \ f(x_N) \end{bmatrix} \sim \textsf{MultivariateNormal} \left( : \text{loc}= \begin{bmatrix} \mu(x_1) \ \vdots \ \mu(x_N) \end{bmatrix} :,: \text{scale}= \begin{bmatrix} k(x_1, x_1) & \cdots & k(x_1, x_N) \ \vdots & \ddots & \vdots \ k(x_N, x_1) & \cdots & k(x_N, x_N) \ \end{bmatrix}^{1/2} : \right) \end{gather} \ y_i \sim \textsf{Normal} \left( \text{loc}=f(x_i), \text{scale}=\sigma \right) \]
请注意协方差矩阵上的指数 \(\frac{1}{2}\):这表示 Cholesky 分解。必须计算 Cholesky,因为 MVN 是一个位置尺度系列分布。不幸的是,Cholesky 分解的计算开销巨大,需要花费 \(O(N^3)\) 的时间和 \(O(N^2)\) 的空间。许多 GP 文献都集中在处理这个看似无害的小指数上。
常见的做法是将先验均值函数设为常量,通常为零。此外,某些记法约定也很方便。我们通常用 \(\mathbf{f}\) 表示采样函数值的有限向量。将 \(k\) 应用于输入对时,生成的协方差矩阵使用了许多有趣的表示法。根据 (Quiñonero-Candela, 2005),我们注意到矩阵的分量是特定输入点上函数值的协方差。因此,我们可以将协方差矩阵表示为 \(K_{AB}\),其中 \(A\) 和 \(B\) 是沿给定矩阵维度的函数值集合的一些指标。
例如,在给定观测数据 \((\mathbf{x}, \mathbf{y})\) 和隐函数值 \(\mathbf{f}\) 的情况下,我们可以编写为:
\[ K_{\mathbf{f},\mathbf{f} } = \begin{bmatrix} k(x_1, x_1) & \cdots & k(x_1, x_N) \ \vdots & \ddots & \vdots \ k(x_N, x_1) & \cdots & k(x_N, x_N) \ \end{bmatrix} \]
同样,我们可以混合多组输入,例如:
\[ K_{\mathbf{f},<em data-md-type="emphasis">} = \begin{bmatrix} k(x_1, x^</em>_1) & \cdots & k(x_1, x^<em data-md-type="emphasis">_T) \ \vdots & \ddots & \vdots \ k(x_N, x^</em>_1) & \cdots & k(x_N, x^*_T) \ \end{bmatrix} \]
其中,我们假设有 \(N\) 个训练输入和 \(T\) 个测试输入。因此,可以将上面的生成式过程紧凑地编写为:
\[ \begin{align} \mathbf{f} \sim : & \textsf{MultivariateNormal} \left( \text{loc}=\mathbf{0}, \text{scale}=K_{\mathbf{f},\mathbf{f} }^{1/2} \right) \ y_i \sim : & \textsf{Normal} \left( \text{loc}=f_i, \text{scale}=\sigma \right), i = 1, \ldots, N \end{align} \]
第一行中的采样运算会从多元高斯生成一组有限的 \(N\) 函数值,而不是上面 GP 抽样表示法中的整个函数。第二行描述了从一元高斯抽样的 \(N\) 的集合,它们以各种函数值为中心,具有固定的观测噪声 \(\sigma^2\)。
借助上述生成式模型,我们就可以继续考虑后验推断问题。这将以上述过程中观测的噪声数据为条件,产生函数值在一组新的测试点上的后验分布。
借助上面的表示法,我们就可以根据相应的输入和训练数据,紧凑地编写未来(噪声)观测值的后验预测分布,如下所示(有关详情,请参阅 Rasmussen & Williams 所著图书的第 2.2 节)。
\[ \mathbf{y}^* \mid \mathbf{x}^<em data-md-type="emphasis">, \mathbf{x}, \mathbf{y} \sim \textsf{Normal} \left( \text{loc}=\mathbf{\mu}^</em>, \text{scale}=(\Sigma^*)^{1/2} \right), \]
其中
\[ \mathbf{\mu}^* = K_{*,\mathbf{f} }\left(K_{\mathbf{f},\mathbf{f} } + \sigma^2 I \right)^{-1} \mathbf{y} \]
且
\[ \Sigma^* = K_{<em data-md-type="emphasis">,</em>} - K_{<em data-md-type="emphasis">,\mathbf{f} } \left(K_{\mathbf{f},\mathbf{f} } + \sigma^2 I \right)^{-1} K_{\mathbf{f},</em>} \]
导入
import time
import numpy as np
import matplotlib.pyplot as plt
import tensorflow.compat.v2 as tf
import tensorflow_probability as tfp
tfb = tfp.bijectors
tfd = tfp.distributions
tfk = tfp.math.psd_kernels
tf.enable_v2_behavior()
from mpl_toolkits.mplot3d import Axes3D
%pylab inline
# Configure plot defaults
plt.rcParams['axes.facecolor'] = 'white'
plt.rcParams['grid.color'] = '#666666'
%config InlineBackend.figure_format = 'png'
Populating the interactive namespace from numpy and matplotlib
示例:噪声正弦数据上的精确 GP 回归
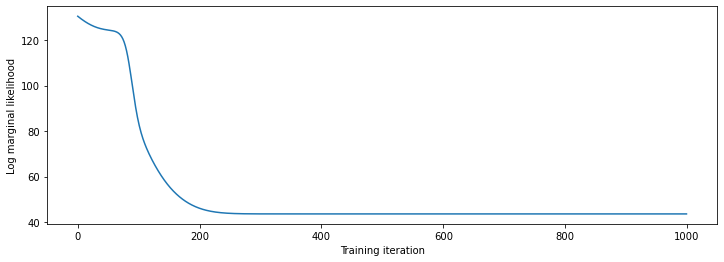
在这里,我们从存在噪声的正弦曲线中生成训练数据,然后从 GP 回归模型的后验中采样一组曲线。我们使用 Adam 来优化内核超参数(将先验下数据的负对数似然最小化)。我们绘制训练曲线,然后是真实函数和后验样本。
def sinusoid(x):
return np.sin(3 * np.pi * x[..., 0])
def generate_1d_data(num_training_points, observation_noise_variance):
"""Generate noisy sinusoidal observations at a random set of points.
Returns:
observation_index_points, observations
"""
index_points_ = np.random.uniform(-1., 1., (num_training_points, 1))
index_points_ = index_points_.astype(np.float64)
# y = f(x) + noise
observations_ = (sinusoid(index_points_) +
np.random.normal(loc=0,
scale=np.sqrt(observation_noise_variance),
size=(num_training_points)))
return index_points_, observations_
# Generate training data with a known noise level (we'll later try to recover
# this value from the data).
NUM_TRAINING_POINTS = 100
observation_index_points_, observations_ = generate_1d_data(
num_training_points=NUM_TRAINING_POINTS,
observation_noise_variance=.1)
我们会将先验放在内核超参数上,然后使用 tfd.JointDistributionNamed 编写超参数和观测数据的联合分布。
def build_gp(amplitude, length_scale, observation_noise_variance):
"""Defines the conditional dist. of GP outputs, given kernel parameters."""
# Create the covariance kernel, which will be shared between the prior (which we
# use for maximum likelihood training) and the posterior (which we use for
# posterior predictive sampling)
kernel = tfk.ExponentiatedQuadratic(amplitude, length_scale)
# Create the GP prior distribution, which we will use to train the model
# parameters.
return tfd.GaussianProcess(
kernel=kernel,
index_points=observation_index_points_,
observation_noise_variance=observation_noise_variance)
gp_joint_model = tfd.JointDistributionNamed({
'amplitude': tfd.LogNormal(loc=0., scale=np.float64(1.)),
'length_scale': tfd.LogNormal(loc=0., scale=np.float64(1.)),
'observation_noise_variance': tfd.LogNormal(loc=0., scale=np.float64(1.)),
'observations': build_gp,
})
我们可以通过验证是否能够从先验中进行采样,以及是否能够计算样本的对数密度,对我们的实现进行健全性检查。
x = gp_joint_model.sample()
lp = gp_joint_model.log_prob(x)
print("sampled {}".format(x))
print("log_prob of sample: {}".format(lp))
sampled {'observation_noise_variance': <tf.Tensor: shape=(), dtype=float64, numpy=2.067952217184325>, 'length_scale': <tf.Tensor: shape=(), dtype=float64, numpy=1.154435715487831>, 'amplitude': <tf.Tensor: shape=(), dtype=float64, numpy=5.383850737703549>, 'observations': <tf.Tensor: shape=(100,), dtype=float64, numpy=
array([-2.37070577, -2.05363838, -0.95152824, 3.73509388, -0.2912646 ,
0.46112342, -1.98018513, -2.10295857, -1.33589756, -2.23027226,
-2.25081374, -0.89450835, -2.54196452, 1.46621647, 2.32016193,
5.82399989, 2.27241034, -0.67523432, -1.89150197, -1.39834474,
-2.33954116, 0.7785609 , -1.42763627, -0.57389025, -0.18226098,
-3.45098732, 0.27986652, -3.64532398, -1.28635204, -2.42362875,
0.01107288, -2.53222176, -2.0886136 , -5.54047694, -2.18389607,
-1.11665628, -3.07161217, -2.06070336, -0.84464262, 1.29238438,
-0.64973999, -2.63805504, -3.93317576, 0.65546645, 2.24721181,
-0.73403676, 5.31628298, -1.2208384 , 4.77782252, -1.42978168,
-3.3089274 , 3.25370494, 3.02117591, -1.54862932, -1.07360811,
1.2004856 , -4.3017773 , -4.95787789, -1.95245901, -2.15960839,
-3.78592731, -1.74096185, 3.54891595, 0.56294143, 1.15288455,
-0.77323696, 2.34430694, -1.05302007, -0.7514684 , -0.98321063,
-3.01300144, -3.00033274, 0.44200837, 0.45060886, -1.84497318,
-1.89616746, -2.15647664, -2.65672581, -3.65493379, 1.70923375,
-3.88695218, -0.05151283, 4.51906677, -2.28117003, 3.03032793,
-1.47713194, -0.35625273, 3.73501587, -2.09328047, -0.60665614,
-0.78177188, -0.67298545, 2.97436033, -0.29407932, 2.98482427,
-1.54951178, 2.79206821, 4.2225733 , 2.56265198, 2.80373284])>}
log_prob of sample: -194.96442183797524
现在,我们来进行优化,以找到具有最高后验概率的参数值。我们将为每个参数定义一个变量,并将它们的值约束为正值。
# Create the trainable model parameters, which we'll subsequently optimize.
# Note that we constrain them to be strictly positive.
constrain_positive = tfb.Shift(np.finfo(np.float64).tiny)(tfb.Exp())
amplitude_var = tfp.util.TransformedVariable(
initial_value=1.,
bijector=constrain_positive,
name='amplitude',
dtype=np.float64)
length_scale_var = tfp.util.TransformedVariable(
initial_value=1.,
bijector=constrain_positive,
name='length_scale',
dtype=np.float64)
observation_noise_variance_var = tfp.util.TransformedVariable(
initial_value=1.,
bijector=constrain_positive,
name='observation_noise_variance_var',
dtype=np.float64)
trainable_variables = [v.trainable_variables[0] for v in
[amplitude_var,
length_scale_var,
observation_noise_variance_var]]
为了使模型符合我们的观测数据,我们将定义一个 target_log_prob 函数,该函数采用(仍待推断)内核超参数。
def target_log_prob(amplitude, length_scale, observation_noise_variance):
return gp_joint_model.log_prob({
'amplitude': amplitude,
'length_scale': length_scale,
'observation_noise_variance': observation_noise_variance,
'observations': observations_
})
# Now we optimize the model parameters.
num_iters = 1000
optimizer = tf.optimizers.Adam(learning_rate=.01)
# Use `tf.function` to trace the loss for more efficient evaluation.
@tf.function(autograph=False, jit_compile=False)
def train_model():
with tf.GradientTape() as tape:
loss = -target_log_prob(amplitude_var, length_scale_var,
observation_noise_variance_var)
grads = tape.gradient(loss, trainable_variables)
optimizer.apply_gradients(zip(grads, trainable_variables))
return loss
# Store the likelihood values during training, so we can plot the progress
lls_ = np.zeros(num_iters, np.float64)
for i in range(num_iters):
loss = train_model()
lls_[i] = loss
print('Trained parameters:')
print('amplitude: {}'.format(amplitude_var._value().numpy()))
print('length_scale: {}'.format(length_scale_var._value().numpy()))
print('observation_noise_variance: {}'.format(observation_noise_variance_var._value().numpy()))
Trained parameters: amplitude: 0.9176153445125278 length_scale: 0.18444082442910079 observation_noise_variance: 0.0880273312850989
# Plot the loss evolution
plt.figure(figsize=(12, 4))
plt.plot(lls_)
plt.xlabel("Training iteration")
plt.ylabel("Log marginal likelihood")
plt.show()
# Having trained the model, we'd like to sample from the posterior conditioned
# on observations. We'd like the samples to be at points other than the training
# inputs.
predictive_index_points_ = np.linspace(-1.2, 1.2, 200, dtype=np.float64)
# Reshape to [200, 1] -- 1 is the dimensionality of the feature space.
predictive_index_points_ = predictive_index_points_[..., np.newaxis]
optimized_kernel = tfk.ExponentiatedQuadratic(amplitude_var, length_scale_var)
gprm = tfd.GaussianProcessRegressionModel(
kernel=optimized_kernel,
index_points=predictive_index_points_,
observation_index_points=observation_index_points_,
observations=observations_,
observation_noise_variance=observation_noise_variance_var,
predictive_noise_variance=0.)
# Create op to draw 50 independent samples, each of which is a *joint* draw
# from the posterior at the predictive_index_points_. Since we have 200 input
# locations as defined above, this posterior distribution over corresponding
# function values is a 200-dimensional multivariate Gaussian distribution!
num_samples = 50
samples = gprm.sample(num_samples)
# Plot the true function, observations, and posterior samples.
plt.figure(figsize=(12, 4))
plt.plot(predictive_index_points_, sinusoid(predictive_index_points_),
label='True fn')
plt.scatter(observation_index_points_[:, 0], observations_,
label='Observations')
for i in range(num_samples):
plt.plot(predictive_index_points_, samples[i, :], c='r', alpha=.1,
label='Posterior Sample' if i == 0 else None)
leg = plt.legend(loc='upper right')
for lh in leg.legendHandles:
lh.set_alpha(1)
plt.xlabel(r"Index points ($\mathbb{R}^1$)")
plt.ylabel("Observation space")
plt.show()
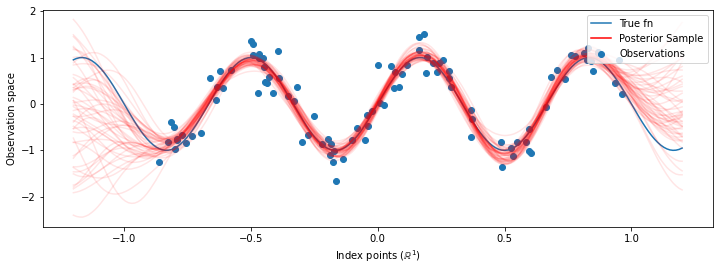
注:如果您多次运行上面的代码,有时效果会很好,有时效果会很糟!参数的最大似然训练非常敏感,并且有时会收敛到较差的模型。最好的方式是使用 MCMC 来边缘化模型超参数。
使用 HMC 边缘化超参数
与其优化超参数,不如尝试用汉密尔顿蒙特卡洛对它们积分。我们首先定义并运行一个采样器,在给定观测值的情况下,从内核超参数的后验分布中进行抽样。
num_results = 100
num_burnin_steps = 50
sampler = tfp.mcmc.TransformedTransitionKernel(
tfp.mcmc.NoUTurnSampler(
target_log_prob_fn=target_log_prob,
step_size=tf.cast(0.1, tf.float64)),
bijector=[constrain_positive, constrain_positive, constrain_positive])
adaptive_sampler = tfp.mcmc.DualAveragingStepSizeAdaptation(
inner_kernel=sampler,
num_adaptation_steps=int(0.8 * num_burnin_steps),
target_accept_prob=tf.cast(0.75, tf.float64))
initial_state = [tf.cast(x, tf.float64) for x in [1., 1., 1.]]
# Speed up sampling by tracing with `tf.function`.
@tf.function(autograph=False, jit_compile=False)
def do_sampling():
return tfp.mcmc.sample_chain(
kernel=adaptive_sampler,
current_state=initial_state,
num_results=num_results,
num_burnin_steps=num_burnin_steps,
trace_fn=lambda current_state, kernel_results: kernel_results)
t0 = time.time()
samples, kernel_results = do_sampling()
t1 = time.time()
print("Inference ran in {:.2f}s.".format(t1-t0))
Inference ran in 9.00s.
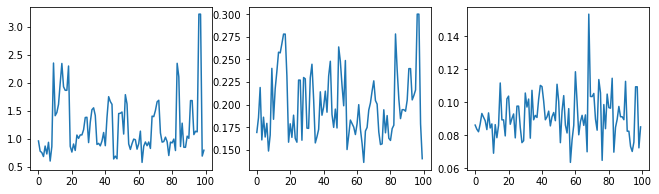
我们通过检查超参数轨迹来对采样器进行健全性检查。
(amplitude_samples,
length_scale_samples,
observation_noise_variance_samples) = samples
f = plt.figure(figsize=[15, 3])
for i, s in enumerate(samples):
ax = f.add_subplot(1, len(samples) + 1, i + 1)
ax.plot(s)
现在,我们不是使用优化的超参数来构造单个 GP,而是将后验预测分布构造为一个 GP 的混合,每个 GP 均由超参数的后验分布中的样本定义。这种方式通过蒙特卡洛采样对后验参数进行近似积分,以计算未观测位置的边缘预测分布。
# The sampled hyperparams have a leading batch dimension, `[num_results, ...]`,
# so they construct a *batch* of kernels.
batch_of_posterior_kernels = tfk.ExponentiatedQuadratic(
amplitude_samples, length_scale_samples)
# The batch of kernels creates a batch of GP predictive models, one for each
# posterior sample.
batch_gprm = tfd.GaussianProcessRegressionModel(
kernel=batch_of_posterior_kernels,
index_points=predictive_index_points_,
observation_index_points=observation_index_points_,
observations=observations_,
observation_noise_variance=observation_noise_variance_samples,
predictive_noise_variance=0.)
# To construct the marginal predictive distribution, we average with uniform
# weight over the posterior samples.
predictive_gprm = tfd.MixtureSameFamily(
mixture_distribution=tfd.Categorical(logits=tf.zeros([num_results])),
components_distribution=batch_gprm)
num_samples = 50
samples = predictive_gprm.sample(num_samples)
# Plot the true function, observations, and posterior samples.
plt.figure(figsize=(12, 4))
plt.plot(predictive_index_points_, sinusoid(predictive_index_points_),
label='True fn')
plt.scatter(observation_index_points_[:, 0], observations_,
label='Observations')
for i in range(num_samples):
plt.plot(predictive_index_points_, samples[i, :], c='r', alpha=.1,
label='Posterior Sample' if i == 0 else None)
leg = plt.legend(loc='upper right')
for lh in leg.legendHandles:
lh.set_alpha(1)
plt.xlabel(r"Index points ($\mathbb{R}^1$)")
plt.ylabel("Observation space")
plt.show()
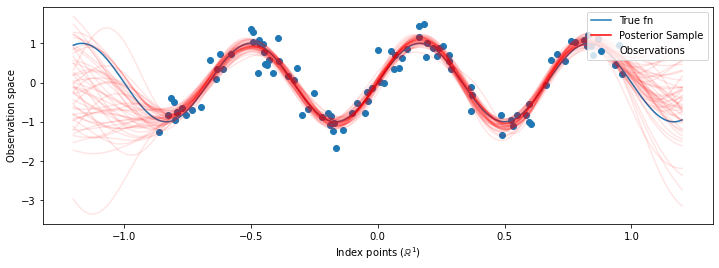
尽管在这种情况下差异很细微,但总的来说,比起上面仅使用最有可能的参数的做法,我们希望后验预测分布能够更好地泛化(为保留的数据提供更高的可能性)。