
- 説明:
これは姿勢推定データセットであり、複数の方向が視覚的に区別できない対称的な 3D 形状で構成されています。課題は、トレーニング中に 1 つの方向のみが各画像とペアになっている場合に、すべての同等の方向を予測することです (ほとんどの姿勢推定データセットのシナリオと同様)。ほとんどの姿勢推定データセットとは対照的に、同等の向きの完全なセットを評価に使用できます。
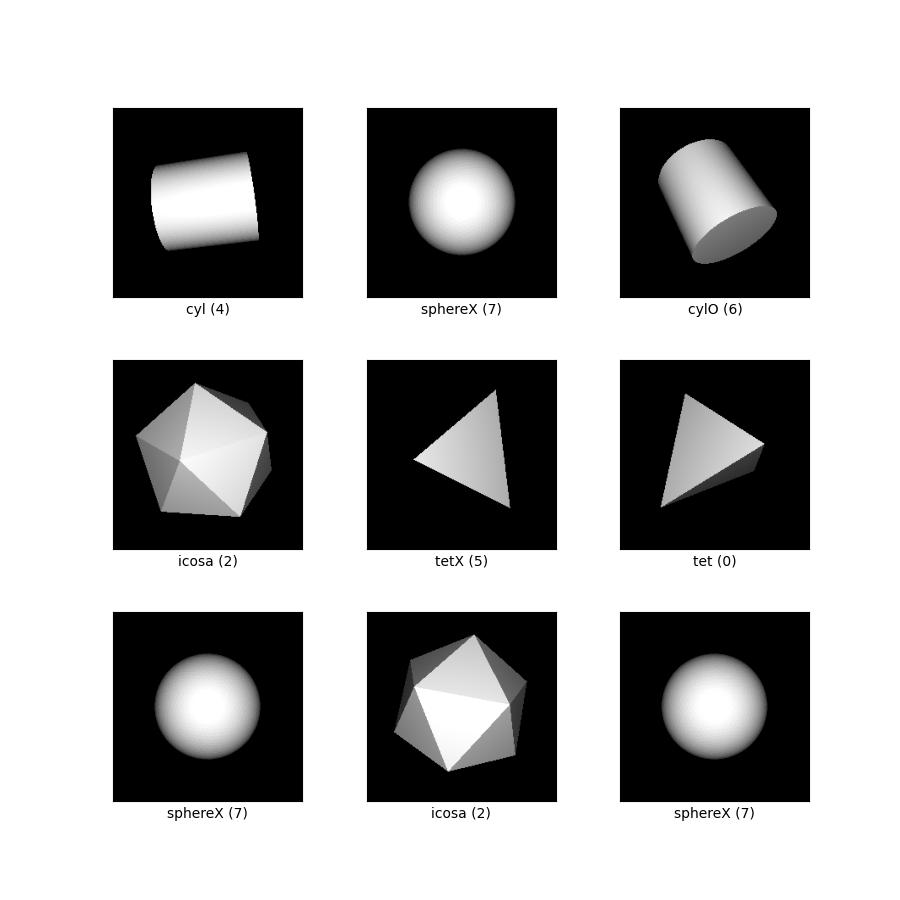
合計 8 つの形状があり、それぞれが 3D 回転の全空間にわたって均一にランダムに分散された 50,000 の視点からレンダリングされます。四面体、立方体、二十面体、円錐、円柱の 5 つの形状は特徴がありません。それらのうち、3 つの正多面体 (四面体、立方体、二十面体) には、それぞれ 12 回、24 回、および 60 回の個別の対称性が注釈付けされています。円錐と円柱には、1 度間隔で離散化された連続対称性で注釈が付けられます。これらの対称性は評価のために提供されています。意図した監視は、各画像で 1 回の回転のみです。
残りの 3 つの形状には、特徴的な特徴があります。 1 つの赤い面を持つ四面体、中心から外れた点を持つ円柱、および点で覆われた X を持つ球があります。際立った特徴が目に見えるかどうかにかかわらず、可能な向きのスペースは減少します。これらの形状に相当する回転のセットは提供していません。
各例には以下が含まれます
- 224x224 RGB 画像
データセットを形状でフィルタリングできるようにするための形状インデックス。
インデックスは次のものに対応します。- 0 = 四面体
- 1 = 立方体
- 2 = 二十面体
- 3 = コーン
- 4 = 円柱
- 5 = マークされた四面体
- 6 = マーク付きの円柱
- 7 = マークされた球
3x3 回転行列として表される、レンダリング プロセスで使用される回転
評価のための、対称性の下での既知の等価回転のセット。
3 つのマークされた形状の場合、これはレンダリングの回転のみです。
追加のドキュメント:コードを使用したペーパーの探索
ホームページ: https://implicit-pdf.github.io
バージョン:
-
1.0.0(デフォルト): 初期リリース。
-
ダウンロードサイズ:
3.10 GiBデータセットサイズ:
3.94 GiB自動キャッシュ(ドキュメント): いいえ
スプリット:
| スプリット | 例 |
|---|---|
'test' | 40,000 |
'train' | 360,000 |
- 機能構造:
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- 機能のドキュメント:
| 特徴 | クラス | 形 | Dtype | 説明 |
|---|---|---|---|---|
| 特徴辞書 | ||||
| 画像 | 画像 | (224、224、3) | uint8 | |
| label_shape | クラスラベル | int64 | ||
| 回転 | テンソル | (3,3) | float32 | |
| 同等の回転数 | テンソル | (なし、3、3) | float32 |
監視されたキー(
as_superviseddocを参照):('image', 'rotation')図( tfds.show_examples ):
- 例( tfds.as_dataframe ):
- 引用:
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}