
- Descripción :
Este es un conjunto de datos de estimación de pose, que consta de formas 3D simétricas donde múltiples orientaciones son visualmente indistinguibles. El desafío es predecir todas las orientaciones equivalentes cuando solo se empareja una orientación con cada imagen durante el entrenamiento (como es el escenario para la mayoría de los conjuntos de datos de estimación de pose). A diferencia de la mayoría de los conjuntos de datos de estimación de posturas, el conjunto completo de orientaciones equivalentes está disponible para su evaluación.
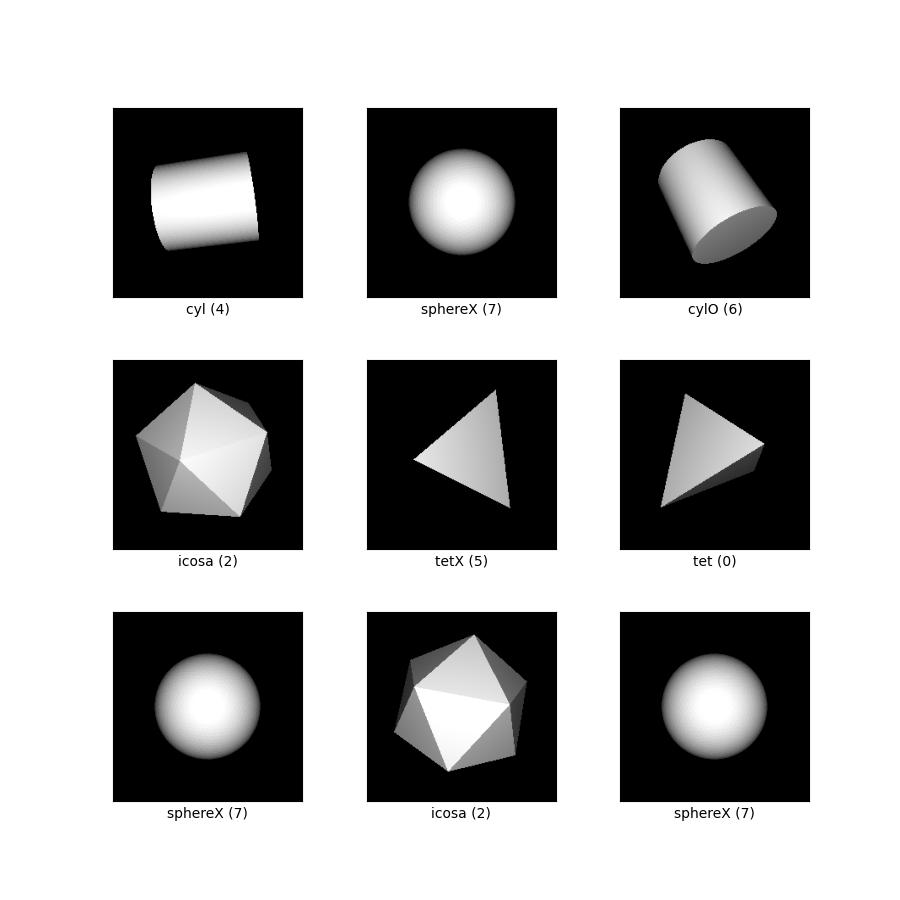
Hay ocho formas en total, cada una representada desde 50.000 puntos de vista distribuidos uniformemente al azar en todo el espacio de rotaciones 3D. Cinco de las formas no tienen características: tetraedro, cubo, icosaedro, cono y cilindro. De ellos, los tres sólidos platónicos (tetraedro, cubo, icosaedro) están anotados con sus simetrías discretas de 12, 24 y 60 veces, respectivamente. El cono y el cilindro están anotados con sus simetrías continuas discretizadas a intervalos de 1 grado. Estas simetrías se proporcionan para evaluación; la supervisión prevista es solo una sola rotación con cada imagen.
Las tres formas restantes están marcadas con una característica distintiva. Hay un tetraedro con una cara de color rojo, un cilindro con un punto descentrado y una esfera con una X coronada por un punto. Ya sea que la característica distintiva sea visible o no, el espacio de posibles orientaciones se reduce. No proporcionamos el conjunto de rotaciones equivalentes para estas formas.
Cada ejemplo contiene de
- la imagen 224x224 RGB
un índice de forma para que el conjunto de datos se pueda filtrar por forma.
Los índices corresponden a:- 0 = tetraedro
- 1 = cubo
- 2 = icosaedro
- 3 = cono
- 4 = cilindro
- 5 = tetraedro marcado
- 6 = cilindro marcado
- 7 = esfera marcada
la rotación utilizada en el proceso de renderizado, representada como una matriz de rotación de 3x3
el conjunto de rotaciones equivalentes conocidas bajo simetría, para evaluación.
En el caso de las tres formas marcadas, esta es solo la rotación de renderizado.
Documentación adicional : Explore en Papers With Code
Página de inicio: https://implicit-pdf.github.io
Código fuente :
tfds.datasets.symmetric_solids.BuilderVersiones :
-
1.0.0(predeterminado): versión inicial.
-
Tamaño de descarga :
3.10 GiBTamaño del conjunto de datos :
3.94 GiBAlmacenamiento automático en caché ( documentación ): No
Divisiones :
| Separar | Ejemplos |
|---|---|
'test' | 40.000 |
'train' | 360.000 |
- Estructura de características :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Documentación de características :
| Rasgo | Clase | Forma | Tipo D | Descripción |
|---|---|---|---|---|
| CaracterísticasDict | ||||
| imagen | Imagen | (224, 224, 3) | uint8 | |
| etiqueta_forma | Etiqueta de clase | int64 | ||
| rotación | Tensor | (3, 3) | flotar32 | |
| rotaciones_equivalente | Tensor | (Ninguno, 3, 3) | flotar32 |
Teclas supervisadas (ver documento
as_supervised):('image', 'rotation')Figura ( tfds.show_examples ):
- Ejemplos ( tfds.as_dataframe ):
- Cita :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}