
- תיאור :
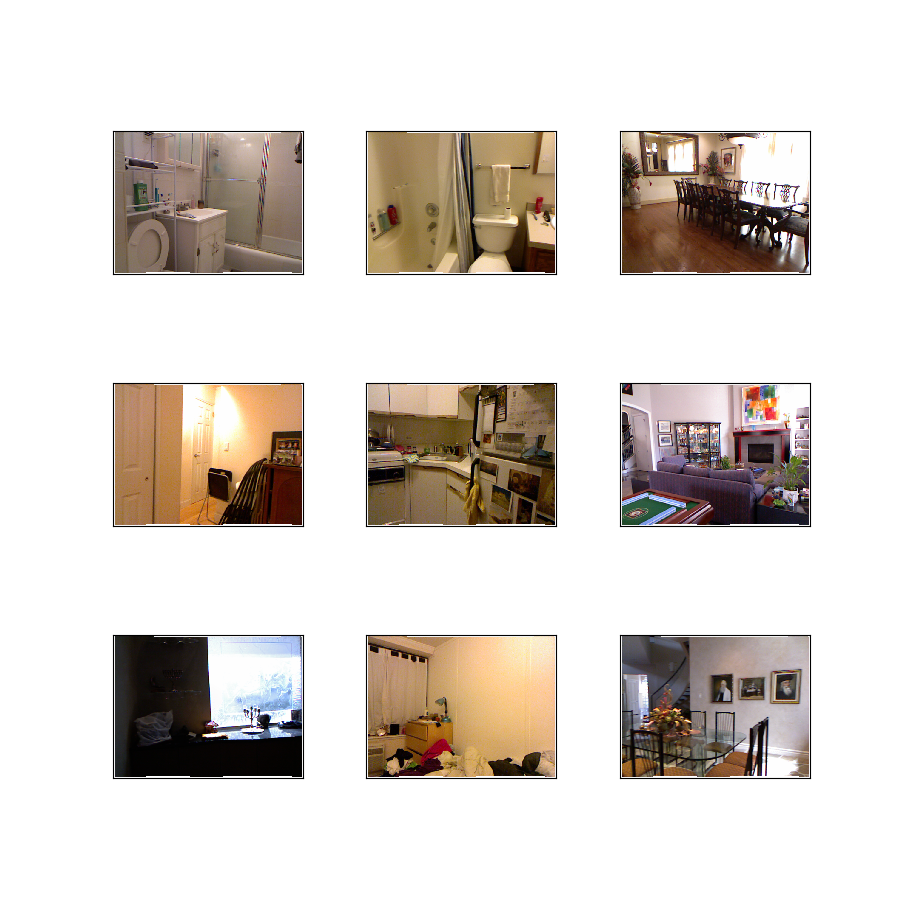
ערכת הנתונים של NYU-Depth V2 מורכבת מרצפי וידאו ממגוון סצנות פנימיות כפי שהוקלטו על ידי מצלמות ה-RGB והן על ידי מצלמות העומק של Microsoft Kinect.
תיעוד נוסף : חקור על ניירות עם קוד
דף הבית : https://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
קוד מקור :
tfds.datasets.nyu_depth_v2.Builderגרסאות :
-
0.0.1(ברירת מחדל): אין הערות שחרור.
-
גודל הורדה :
31.92 GiBגודל מערך נתונים :
74.03 GiBשמירה אוטומטית במטמון ( תיעוד ): לא
פיצולים :
| לְפַצֵל | דוגמאות |
|---|---|
'train' | 47,584 |
'validation' | 654 |
- מבנה תכונה :
FeaturesDict({
'depth': Tensor(shape=(480, 640), dtype=float16),
'image': Image(shape=(480, 640, 3), dtype=uint8),
})
- תיעוד תכונה :
| תכונה | מעמד | צוּרָה | Dtype | תיאור |
|---|---|---|---|---|
| FeaturesDict | ||||
| עוֹמֶק | מוֹתֵחַ | (480, 640) | לצוף16 | |
| תמונה | תמונה | (480, 640, 3) | uint8 |
מפתחות בפיקוח (ראה
as_superviseddoc ):('image', 'depth')איור ( tfds.show_examples ):
- דוגמאות ( tfds.as_dataframe ):
- ציטוט :
@inproceedings{Silberman:ECCV12,
author = {Nathan Silberman, Derek Hoiem, Pushmeet Kohli and Rob Fergus},
title = {Indoor Segmentation and Support Inference from RGBD Images},
booktitle = {ECCV},
year = {2012}
}
@inproceedings{icra_2019_fastdepth,
author = {Wofk, Diana and Ma, Fangchang and Yang, Tien-Ju and Karaman, Sertac and Sze, Vivienne},
title = {FastDepth: Fast Monocular Depth Estimation on Embedded Systems},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2019}
}