
- opis :
Jest to zestaw danych do szacowania ułożenia, składający się z symetrycznych kształtów 3D, w których wiele orientacji jest wizualnie nie do odróżnienia. Wyzwaniem jest przewidzenie wszystkich równoważnych orientacji, gdy tylko jedna orientacja jest sparowana z każdym obrazem podczas treningu (tak jak w przypadku większości zestawów danych do szacowania pozycji). W przeciwieństwie do większości zestawów danych do szacowania pozycji, do oceny dostępny jest pełny zestaw równoważnych orientacji.
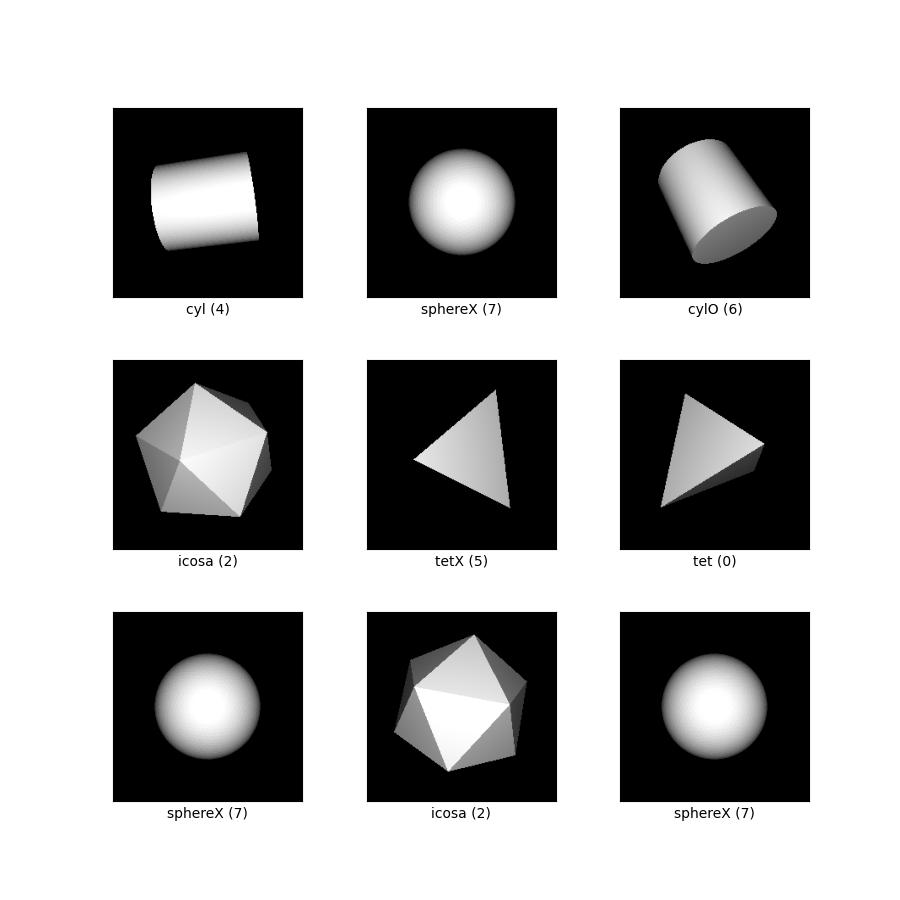
W sumie jest osiem kształtów, z których każdy jest renderowany z 50 000 punktów widzenia rozmieszczonych równomiernie losowo w całej przestrzeni rotacji 3D. Pięć kształtów jest pozbawionych cech - czworościan, sześcian, dwudziestościan, stożek i walec. Spośród nich trzy bryły platońskie ( czworościan , sześcian , dwudziestościan ) są opatrzone odpowiednio 12-, 24- i 60-krotnymi dyskretnymi symetriami. Stożek i cylinder są opatrzone adnotacjami z ich ciągłymi symetriami dyskretyzowanymi w odstępach 1 stopnia. Te symetrie są podane do oceny; zamierzony nadzór to tylko jeden obrót z każdym obrazem.
Pozostałe trzy kształty są oznaczone wyróżnikiem. Jest czworościan z jedną czerwoną ścianą, cylinder z kropką poza środkiem i kula z X zakończonym kropką. Niezależnie od tego, czy cecha wyróżniająca jest widoczna, zmniejsza się przestrzeń możliwych orientacji. Nie udostępniamy zestawu równoważnych obrotów dla tych kształtów.
Każdy przykład zawiera
- obraz RGB 224x224
indeks kształtu, aby zestaw danych mógł być filtrowany według kształtu.
Indeksy odpowiadają:- 0 = czworościan
- 1 = sześcian
- 2 = dwudziestościan
- 3 = stożek
- 4 = cylinder
- 5 = zaznaczony czworościan
- 6 = oznaczony cylinder
- 7 = zaznaczona kula
obrót używany w procesie renderowania, reprezentowany jako macierz obrotu 3x3
zestaw znanych równoważnych obrotów w symetrii do oceny.
W przypadku trzech zaznaczonych kształtów jest to tylko obrót renderowania.
Dodatkowa dokumentacja : Przeglądaj dokumenty z kodem na
Strona główna : https://implicit-pdf.github.io
Kod źródłowy :
tfds.datasets.symmetric_solids.BuilderWersje :
-
1.0.0(domyślnie): Wersja początkowa.
-
Rozmiar pliku do pobrania :
3.10 GiBRozmiar zestawu danych :
3.94 GiBAutomatyczne buforowanie ( dokumentacja ): Nie
Podziały :
| Rozdzielać | Przykłady |
|---|---|
'test' | 40 000 |
'train' | 360 000 |
- Struktura funkcji :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Dokumentacja funkcji :
| Funkcja | Klasa | Kształt | Typ D | Opis |
|---|---|---|---|---|
| FunkcjeDict | ||||
| obraz | Obraz | (224, 224, 3) | uint8 | |
| kształt_etykiety | Etykieta klasy | int64 | ||
| obrót | Napinacz | (3, 3) | pływak32 | |
| obroty_równoważne | Napinacz | (Brak, 3, 3) | pływak32 |
Klucze nadzorowane (zobacz dokument
as_supervised):('image', 'rotation')Rysunek ( tfds.show_examples ):
- Przykłady ( tfds.as_dataframe ):
- Cytat :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}