
- Deskripsi :
Ini adalah set data estimasi pose, yang terdiri dari bentuk 3D simetris dengan banyak orientasi yang tidak dapat dibedakan secara visual. Tantangannya adalah untuk memprediksi semua orientasi yang setara ketika hanya satu orientasi dipasangkan dengan setiap gambar selama pelatihan (seperti skenario untuk sebagian besar kumpulan data estimasi pose). Berbeda dengan sebagian besar set data estimasi pose, set lengkap orientasi ekuivalen tersedia untuk evaluasi.
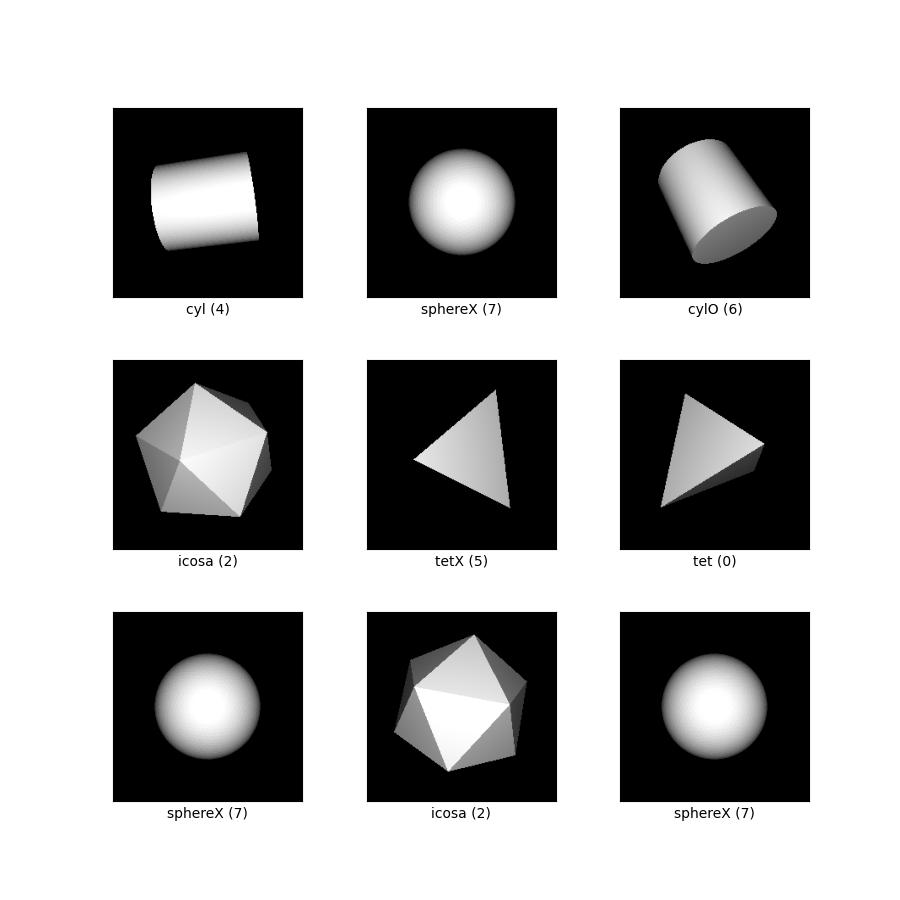
Ada total delapan bentuk, masing-masing dirender dari 50.000 sudut pandang yang didistribusikan secara acak secara acak di seluruh ruang rotasi 3D. Lima dari bentuk tidak berbentuk - tetrahedron, kubus, icosahedron, kerucut, dan silinder. Dari jumlah tersebut, tiga padatan Platonis (tetrahedron, kubus, ikosahedron) dianotasi dengan simetri diskrit 12-, 24-, dan 60 kali lipat. Kerucut dan silinder dianotasi dengan kesimetrian kontinunya yang didiskritisasi pada interval 1 derajat. Simetri ini disediakan untuk evaluasi; pengawasan yang dimaksud hanya satu putaran dengan masing-masing gambar.
Tiga bentuk yang tersisa ditandai dengan fitur yang membedakan. Ada sebuah tetrahedron dengan satu sisi berwarna merah, sebuah silinder dengan titik di luar pusat, dan sebuah bola dengan sebuah X yang ditutup oleh sebuah titik. Apakah fitur pembeda terlihat atau tidak, ruang kemungkinan orientasi berkurang. Kami tidak menyediakan rangkaian rotasi setara untuk bentuk ini.
Setiap contoh berisi
- gambar 224x224 RGB
indeks bentuk sehingga kumpulan data dapat difilter berdasarkan bentuk.
Indeks sesuai dengan:- 0 = tetrahedron
- 1 = kubus
- 2 = ikosahedron
- 3 = kerucut
- 4 = silinder
- 5 = bertanda tetrahedron
- 6 = silinder bertanda
- 7 = bola bertanda
rotasi yang digunakan dalam proses rendering, direpresentasikan sebagai matriks rotasi 3x3
himpunan rotasi ekuivalen yang diketahui di bawah simetri, untuk evaluasi.
Dalam kasus tiga bentuk yang ditandai, ini hanyalah rotasi rendering.
Dokumentasi Tambahan : Jelajahi di Makalah Dengan Kode
Beranda : https://implisit-pdf.github.io
Kode sumber :
tfds.datasets.symmetric_solids.BuilderVersi :
-
1.0.0(default): Rilis awal.
-
Ukuran unduhan :
3.10 GiBUkuran dataset :
3.94 GiBDi-cache otomatis ( dokumentasi ): Tidak
Perpecahan :
| Membelah | Contoh |
|---|---|
'test' | 40.000 |
'train' | 360.000 |
- Struktur fitur :
FeaturesDict({
'image': Image(shape=(224, 224, 3), dtype=uint8),
'label_shape': ClassLabel(shape=(), dtype=int64, num_classes=8),
'rotation': Tensor(shape=(3, 3), dtype=float32),
'rotations_equivalent': Tensor(shape=(None, 3, 3), dtype=float32),
})
- Dokumentasi fitur :
| Fitur | Kelas | Membentuk | Dtype | Keterangan |
|---|---|---|---|---|
| fiturDict | ||||
| gambar | Gambar | (224, 224, 3) | uint8 | |
| label_shape | LabelKelas | int64 | ||
| rotasi | Tensor | (3, 3) | float32 | |
| rotations_equivalent | Tensor | (Tidak ada, 3, 3) | float32 |
Kunci yang diawasi (Lihat
as_superviseddoc ):('image', 'rotation')Gambar ( tfds.show_examples ):
- Contoh ( tfds.as_dataframe ):
- Kutipan :
@inproceedings{implicitpdf2021,
title = {Implicit Representation of Probability Distributions on the Rotation
Manifold},
author = {Murphy, Kieran and Esteves, Carlos and Jampani, Varun and
Ramalingam, Srikumar and Makadia, Ameesh}
booktitle = {International Conference on Machine Learning}
year = {2021}
}