
পাবলিক ফাইনাল ক্লাস ডায়নামিক স্টিচ
একটি একক টেনসরে `ডেটা` টেনসর থেকে মানগুলিকে ইন্টারলিভ করুন।
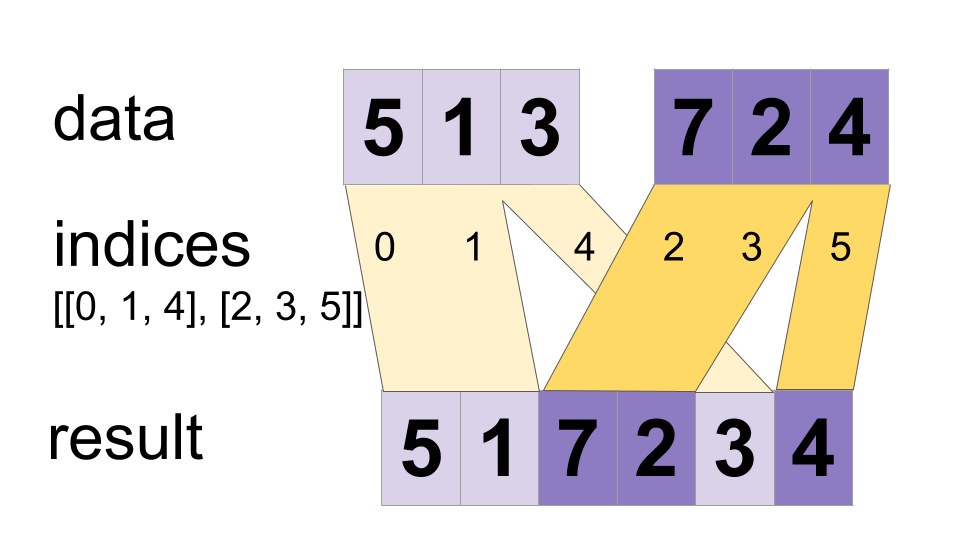
একটি মার্জড টেনসর তৈরি করে যেমন
merged[indices[m][i, ..., j], ...] = data[m][i, ..., j, ...]
# Scalar indices:
merged[indices[m], ...] = data[m][...]
# Vector indices:
merged[indices[m][i], ...] = data[m][i, ...]
merged.shape = [max(সূচক) + 1] + ধ্রুবক
মানগুলিকে ক্রমানুসারে মার্জ করা হয়, তাই যদি `(m,i) < (n,j)` স্লাইস `ডেটা'র জন্য `সূচক[m][i]` এবং `সূচক[n][j]` উভয় ক্ষেত্রেই কোনো সূচক দেখা যায় [n][j]` মার্জ করা ফলাফলে প্রদর্শিত হবে। আপনার যদি এই গ্যারান্টির প্রয়োজন না হয়, তাহলে কিছু ডিভাইসে ParallelDynamicStitch আরও ভালো পারফর্ম করতে পারে।
উদাহরণস্বরূপ:
indices[0] = 6
indices[1] = [4, 1]
indices[2] = [[5, 2], [0, 3]]
data[0] = [61, 62]
data[1] = [[41, 42], [11, 12]]
data[2] = [[[51, 52], [21, 22]], [[1, 2], [31, 32]]]
merged = [[1, 2], [11, 12], [21, 22], [31, 32], [41, 42],
[51, 52], [61, 62]]
# Apply function (increments x_i) on elements for which a certain condition
# apply (x_i != -1 in this example).
x=tf.constant([0.1, -1., 5.2, 4.3, -1., 7.4])
condition_mask=tf.not_equal(x,tf.constant(-1.))
partitioned_data = tf.dynamic_partition(
x, tf.cast(condition_mask, tf.int32) , 2)
partitioned_data[1] = partitioned_data[1] + 1.0
condition_indices = tf.dynamic_partition(
tf.range(tf.shape(x)[0]), tf.cast(condition_mask, tf.int32) , 2)
x = tf.dynamic_stitch(condition_indices, partitioned_data)
# Here x=[1.1, -1., 6.2, 5.3, -1, 8.4], the -1. values remain
# unchanged.
পাবলিক পদ্ধতি
| আউটপুট <T> | আউটপুট হিসাবে () একটি টেনসরের প্রতীকী হ্যান্ডেল প্রদান করে। |
| স্ট্যাটিক <T> ডাইনামিক স্টিচ <T> | |
| আউটপুট <T> | একত্রিত () |
উত্তরাধিকারসূত্রে প্রাপ্ত পদ্ধতি
পাবলিক পদ্ধতি
সর্বজনীন আউটপুট <T> হিসাবে আউটপুট ()
একটি টেনসরের প্রতীকী হ্যান্ডেল প্রদান করে।
TensorFlow অপারেশনের ইনপুট হল অন্য TensorFlow অপারেশনের আউটপুট। এই পদ্ধতিটি একটি প্রতীকী হ্যান্ডেল পেতে ব্যবহৃত হয় যা ইনপুটের গণনাকে প্রতিনিধিত্ব করে।
পাবলিক স্ট্যাটিক ডায়নামিক স্টিচ <T> তৈরি করুন ( স্কোপ স্কোপ, পুনরাবৃত্তিযোগ্য< অপারেন্ড <পূর্ণসংখ্যা>> সূচক, পুনরাবৃত্তিযোগ্য< অপারেন্ড <T>> ডেটা)
একটি নতুন ডায়নামিক স্টিচ অপারেশন মোড়ানো একটি ক্লাস তৈরি করার কারখানার পদ্ধতি।
পরামিতি
| সুযোগ | বর্তমান সুযোগ |
|---|
রিটার্নস
- ডায়নামিক স্টিচের একটি নতুন উদাহরণ